Yaskawa J50M Instructions User Manual
Page 227
Address
D4
D3
A
o
0
0
0
1
B
o
0
1
0
c
o
0
0
1
u
1
0
1
0
1
v
0
0
w
1
0
1
1
1
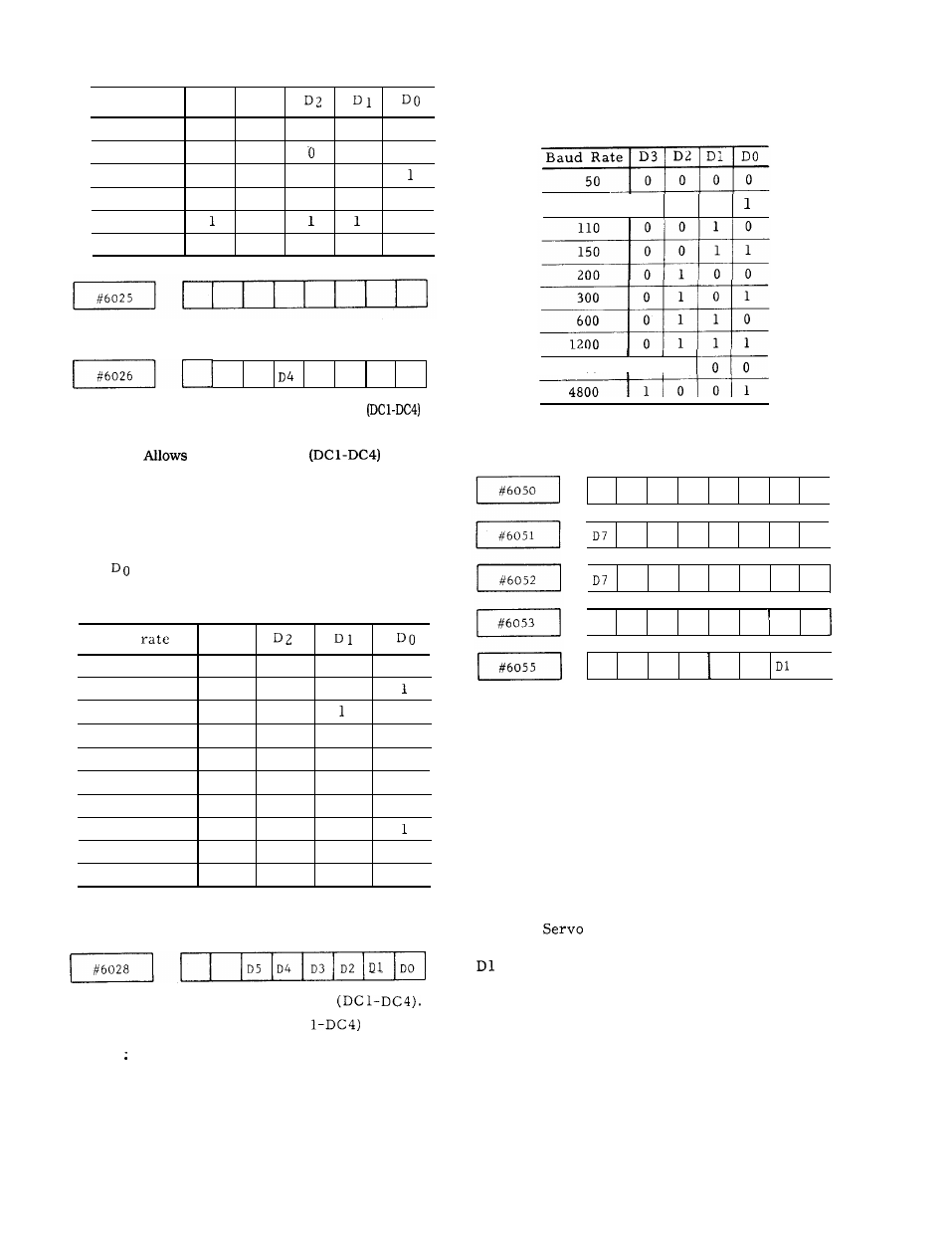
Parameter #6025 cannot be written at any time.
D5
D3
D2
D1
DO
D5 1:
Does not allow the control code
to be used on the input device.
o :
the control code
to be
used on the input device.
D4 1:
Employs 2 stop bits on the input device.
o :
Employs 1 stop bit on the input device.
D3 -
Baud rate setting
Baud
D3
50
0
0
0
0
100
0
0
0
110
0
0
0
150
0
0
1
1
200
0
1
0
0
300
0
1
0
1
600
0
1
1
0
1200
0
1
1
2400
1
0
0
0
4800
1
0
0
1
Note : #6026 provides the setting on input device
1 (s10-1).
D5 D4
D3 D2
DO
D5
1: Does not use control codes
O: Uses control codes (DC
D4
1 Employs 2 stop bits on the output device,
O : Employs 1 stop bit on the output device.
D3 to DO Baud rate setting
Baud rate setting
100
I
o
0
0
2400
1 1 0
Note : #6028 is for the setting on output device
1 (s10-1).
D7
D6
D5
DO
I
D6
D5
DO
I
D6
D5
DO
D7
D6
D5
DO
D7
D6
D5
DO
I
Shown in the order of X-axis, Y-axis, Z-axis, 4th
axis and spindle.
D7, D6
Be sure to set the assignment of servo control
form.
C N T L 2 : 0
C N T L 1 : 0
Spindle only: O, 1
D5 1:
No servo control is performed.
o:
control is performed.
1:
Perform spindle indexing when
the solid tap mode by G93.
entering
o:
Do not perform spindle indexing when
entering the solid tap mode by G93.
219