9 ) encoder settings – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 100
4.4 MP2000 Series Machine Controller Parameter Details
4.4.1 Motion Fixed Parameter Details
4-24
( 9 ) Encoder Settings
No. 34 (Rotary Motor)
Rated Motor Speed
Setting Range
Setting Unit
Default Value
1 to 32000
min
-1
3000
Description
Set the rated motor speed in 1 min
-1
units.
Set this parameter based on the specifications of the motor that is used.
No.34 (Linear Motor)
Rated Speed
Setting Range
Setting Unit
Default Value
1 to 32000
0.1m/s,
0.1mm/s
3000
Description
Set the rated speed.
Set the rated speed in accordance with the specifications of the linear servomotor to be used.
• When the reference unit is set to pulse: The setting unit is either 0.1 m/s or 0.1 mm/s.
Use units of 0.1 m/s when the linear scale pitch is set in units of
μm.
Use units of 0.1 mm/s when the linear scale pitch is set in units of nm.
• When reference unit is set to mm: The setting unit is 0.1 m/s.
• When reference unit is set to
μm: The setting unit is 0.1 mm/s.
Refer to 5.1.8 Linear Scale Pitch and Rated Speed for details.
No. 36 (Rotary Motor)
Number of Pulses per Motor Rotation
Setting Range
Setting Unit
Default Value
1 to 2
31
−1
pulse
65536
Description
Set the number of feedback pulses per motor rotation.
Set the value after multiplication to match the specifications of the motor used.
(For example, if a 16-bit encoder is used, set 2
16
= 65536.)
No.36 (Linear Motor)
Number of pulses per Linear Scale Pitch
Setting Range
Setting Unit
Default Value
1 to 2
31
−1
pulses/scale
pitch
65536
Description
Set the number of pulses equivalent to the value set for No.6: Linear Scale Pitch.
Set the value in accordance with the specifications of the linear motor to be used
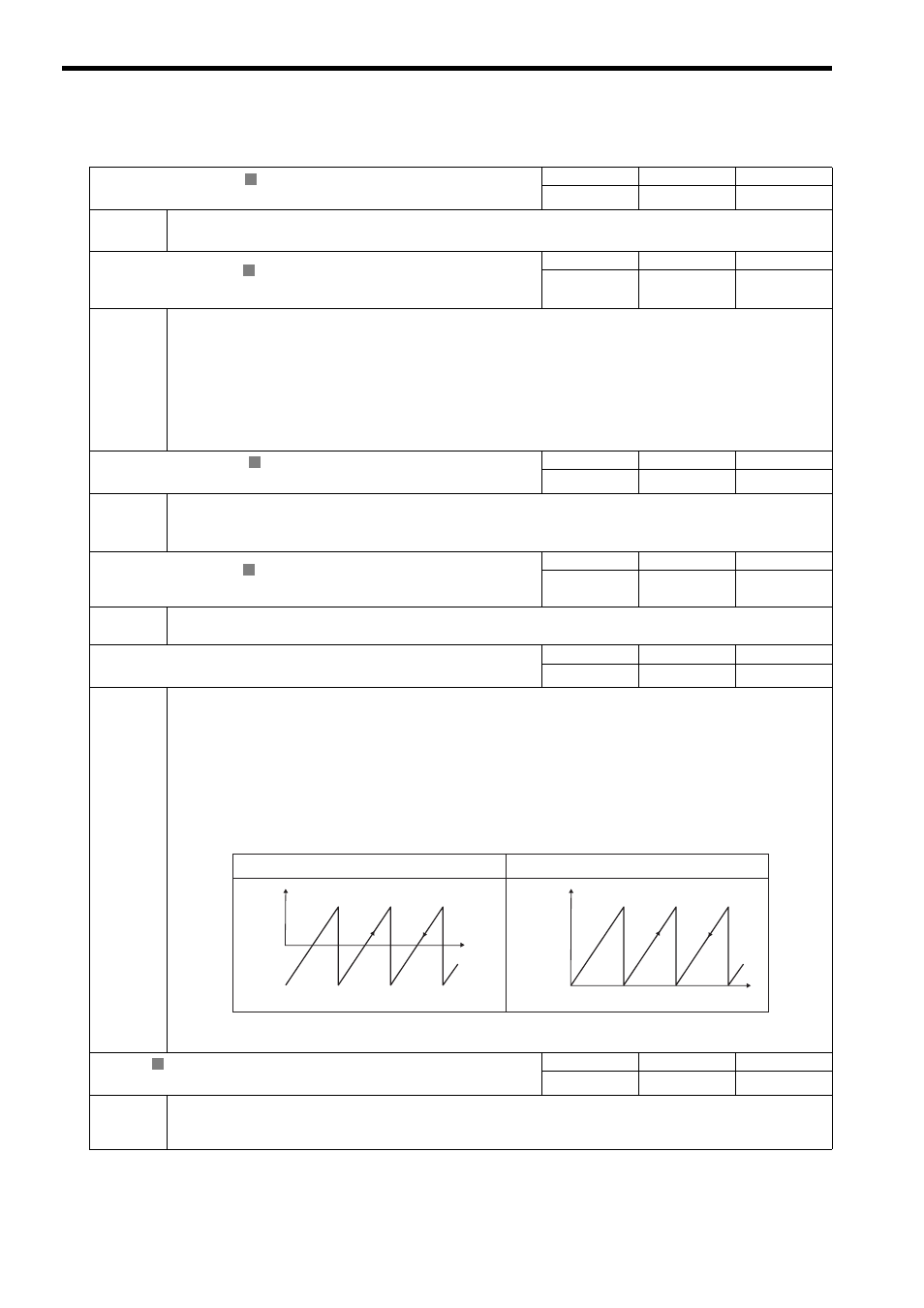
No. 38
Maximum Number of Absolute Encoder Turns Rotation
Setting Range
Setting Unit
Default Value
1 to 2
31
−1
rev
65534
Description
Set the maximum number of rotations for the absolute encoder to the highest number that the encoder can man-
age.
Set this parameter to match the settings of the encoder being used.
•
Σ-I series: Set to 99999 (fixed).
•
Σ-II, Σ-III, and Σ-V Series: Set to the same value as the multiturn limit in the SERVOPACK.
<Example>
For axes set as infinite axes (bit 0 of fixed parameter Function Selection Flag 1 set to 1), set to 65534 max. (same value as
Pn205).
This parameter is used to manage position information when an absolute encoder is used and an infinite length axis has
been set.
No. 42
Feedback Speed Movement Averaging Time Constant
Setting Range
Setting Unit
Default Value
0 to 32
ms
10
Description
Set the moving average time constant for the feedback speed.
The Feedback Speed (monitoring parameter IL
40) is the value determined by this parameter and the unit-converted
difference between feedback positions of each high-speed scan.
R
R
R
R
0
0
−32768
+32767
Pn205 value
Forward
rotation
Revolutions
Reverse
rotation
Multiturn
data
Forward
rotation
Revolutions
Reverse
rotation
Multiturn
data
Parameter 38 and Pn205 = 65535
Parameter 38 and Pn205 ≠ 65535
Finite Axes
Infinite Axes
R