4 ) detailed descriptions – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 354
9.4 Absolute Position Detection for Infinite Length Axes
9.4.2 Parameter Settings for Simple Absolute Infinite Length Position Control
9-17
Absolute Position Detection
( 4 ) Detailed Descriptions
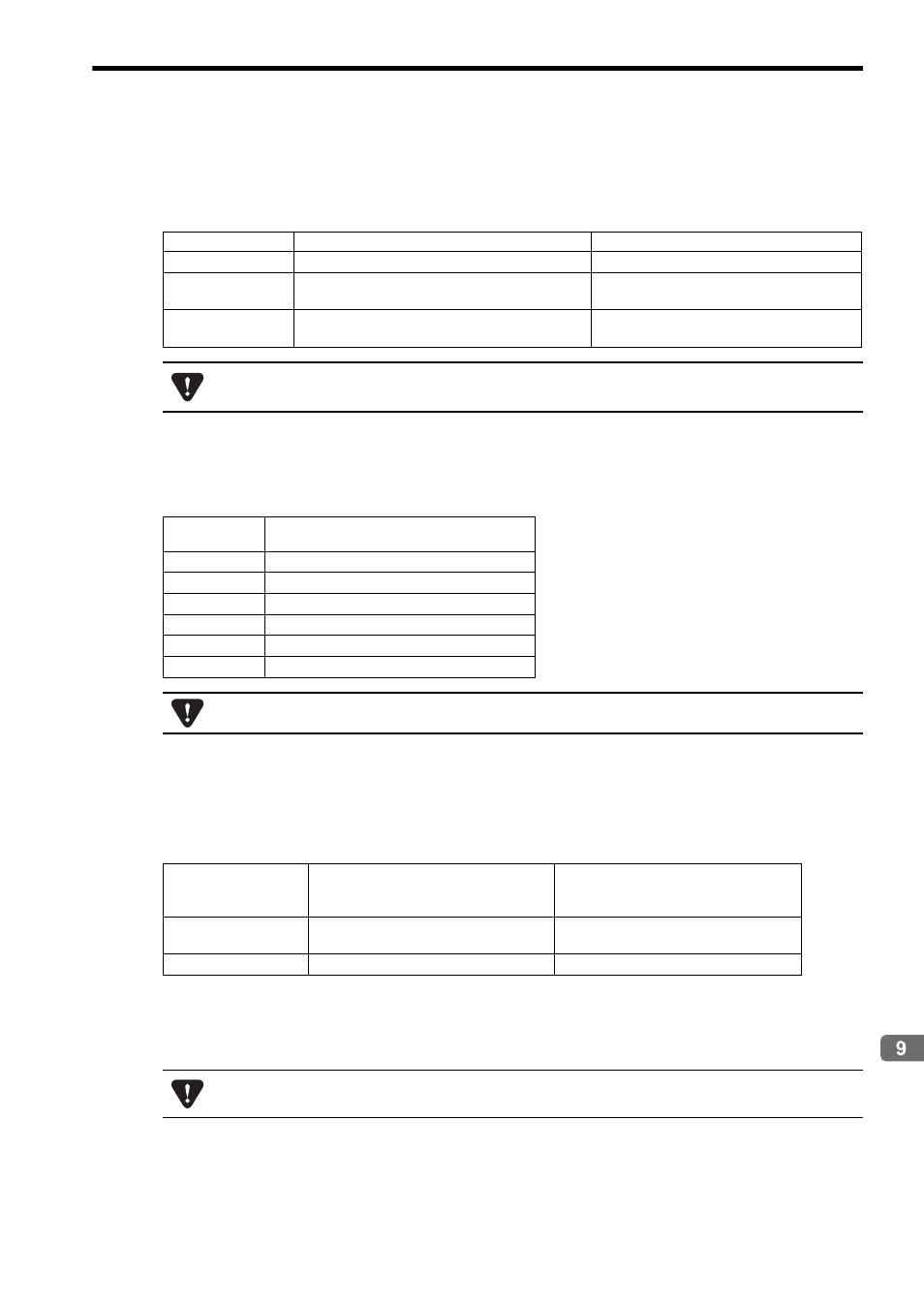
[ a ] Encoder Type/Absolute Encoder Usage
For an axis performing absolute position detection, set the parameters as shown in the table below.
[ b ] Encoder Resolution
Refer to the following table and set the fixed parameter 36 (Number of Pulses per Motor Rotation) according to the
number of servomotor bits. The settings can be used for all SERVOPACK models.
[ c ] Maximum Number of Absolute Encoder Turns Rotation/Multiturn Limit Setting
These parameters determine the maximum value of the number of encoder turns managed by the SERVOPACK and
Machine Controller.
For an infinite length axis, set the parameters as shown in the table below.
* For details on the setting procedure, refer to Appendix D Setting the Multiturn Limit. If the Machine Controller fixed
parameter 38 is set to 65535 when using a
Σ-II, Σ-III, and Σ-V series SERVOPACK for an infinite axis, a fixed
parameter setting error will occur. When using a direct drive motor, set both the Machine Controller’s fixed
parameter 38 and the SERVOPACK’s parameter Pn205 to 0.
Model
Parameter
Setting
Machine Controller
Fixed parameter 30: Encoder Selection
1: Absolute encoder
Σ-II and Σ-III Series
SERVOPACK
Parameter Pn002.2: Absolute Encoder Usage
0: Uses absolute encoder as an absolute encoder
Σ-I Series SERVO-
PACK
Parameter Cn-0001, Bit E: Encoder Type
1: Absolute encoder
If the above settings are not used, correct motion control will not be performed. Set the parameters carefully.
Be sure to set both the Machine Controller and SERVOPACK parameters.
Number of Bits
Fixed Parameter 36
(Number of Pulses per Motor Rotation)
12
4096
13
8192
15
32768
16
65536
17
131072
20
1048576
If the above settings are not used, correct motion control will not be performed. Set the parameters carefully.
Applicable
SERVOPAC
K
Fixed Parameter 38
(Max. No. of Absolute Encoder Turns Rota-
tion)
SERVOPACK
Parameter Pn205
(Multiturn Limit Setting)
Σ-II, Σ-III, and Σ-V
Series
Set the same value as Pn205 *
65534 max.
*
Σ-I Series
99999
−
Set the parameters correctly as shown in the above table. Otherwise, correct motion control will not be per-
formed resulting in position error.