A-38, 2 ) absolute encoder infinite length axis, 3 ) absolute encoder finite length axis – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 527: 4 ) user constants self-writing function, 5 ) self-configuration
Appendix H Wild Card Servos
H.5 Availability When Using Wild Card Servos
A-38
( 2 ) Absolute Encoder Infinite Length Axis
Wild card servos do not support the absolute encoder infinite length axis.
( 3 ) Absolute Encoder Finite Length Axis
The absolute encoder finite length axis is supported for wild card servos, but the allowable stroke is determined by the
specifications of the servo driver being used.
Check the absolute position data range that the servo driver can handle to know whether the absolute encoder finite
length axis can be used or not.
( 4 ) User Constants Self-writing Function
The automatic updating of the parameters function is invalid for wild card servos.
( 5 ) Self-configuration
When the Machine Controller recognizes the slave station as an unsupported servo, the servo is allocated as
“****SERVO” type and the fixed parameters will be set by default.
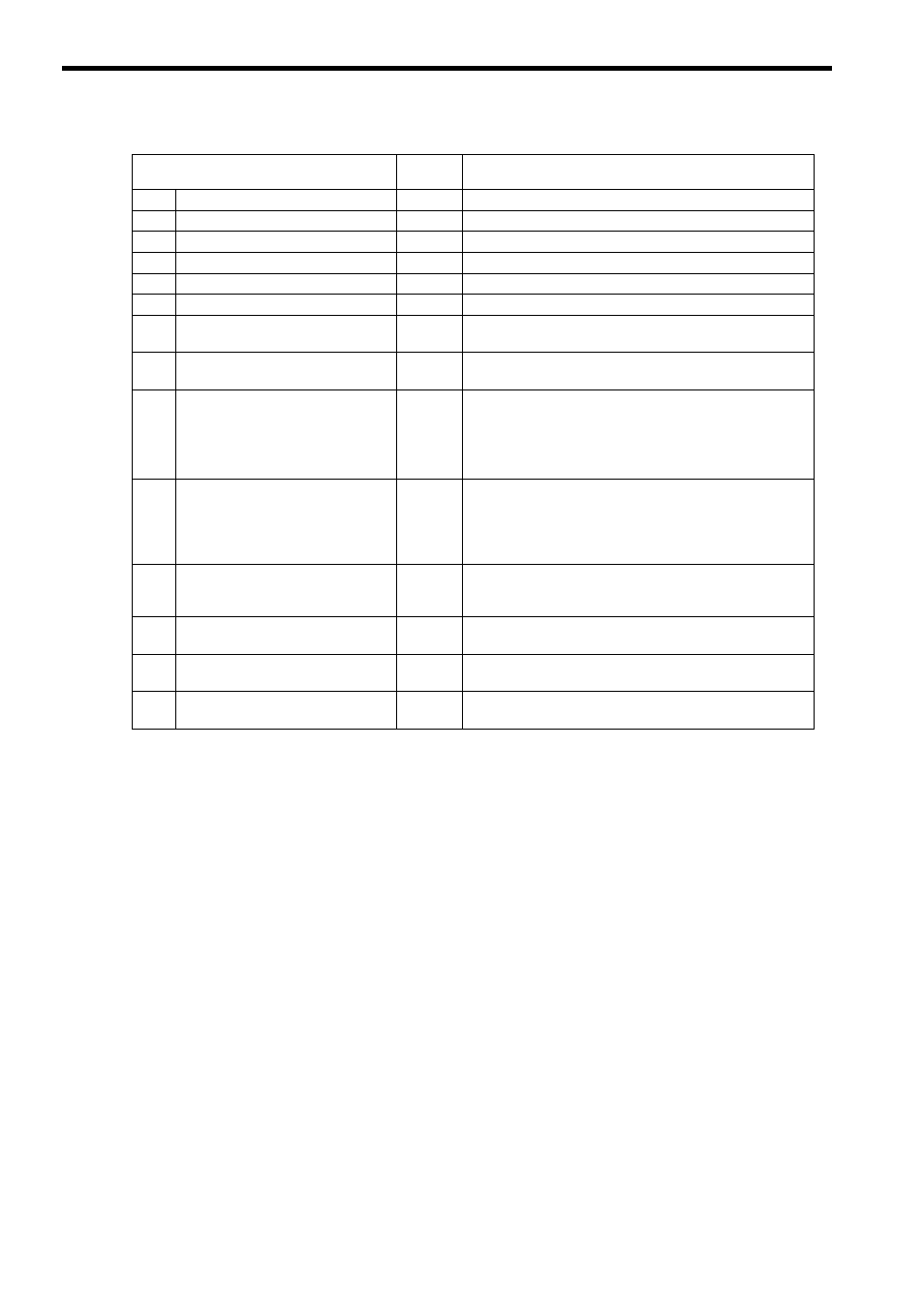
15
Change Position Loop Gain (KPS)
×
Invalid
16
Change Feed Forward (KFS)
×
Invalid
17
Read User Constant (PRM_RD)
−
18
Write User Constant (PRM_WR)
−
19
Alarm Monitor (ALM_MON)
−
20
Alarm History Monitor (ALM_HIST)
−
21
Clear Alarm History
(ALMHIST_CLR)
−
22
Absolute Encoder Reset
(ABS_RST)
×
Executing this command will cause Command Error Completed
Status (FAIL).
23
Speed Reference (VELO)
×
Operation is possible.
The internal processing will be implemented while assuming the
maximum speed to be 4500min
-1
, however, some servos may
operate adversely at a speed significantly different from the tar-
get speed.
24
Torque/Thrust Reference (TRQ)
×
Operation is possible.
The internal processing will be implemented while assuming the
maximum torque to be 300%, however, some servos may oper-
ate adversely with a torque significantly different from the target
torque.
25
Phase Reference (PHASE)
×
Operation is possible.
However, execution of this command may not result as intended
for some servos.
26
Change Position Loop Integral Time
Constant (KIS)
×
Invalid
27
Stored Parameter Write
(PPRM_WR)
−
39
Multiturn Limit Setting
(MLTTRN_SET)
×
Executing this command will cause Command Error Completed
Status (FAIL).
(cont’d)
Motion Command
Applica-
tion
Remarks