2 ) related parameters, 3 ) timing charts – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 268
6.4 Motion Subcommand Details
6.4.4 Status Monitor (SMON)
6-107
Motion Commands
( 2 ) Related Parameters
[ a ] Setting Parameters
[ b ] Monitoring Parameters
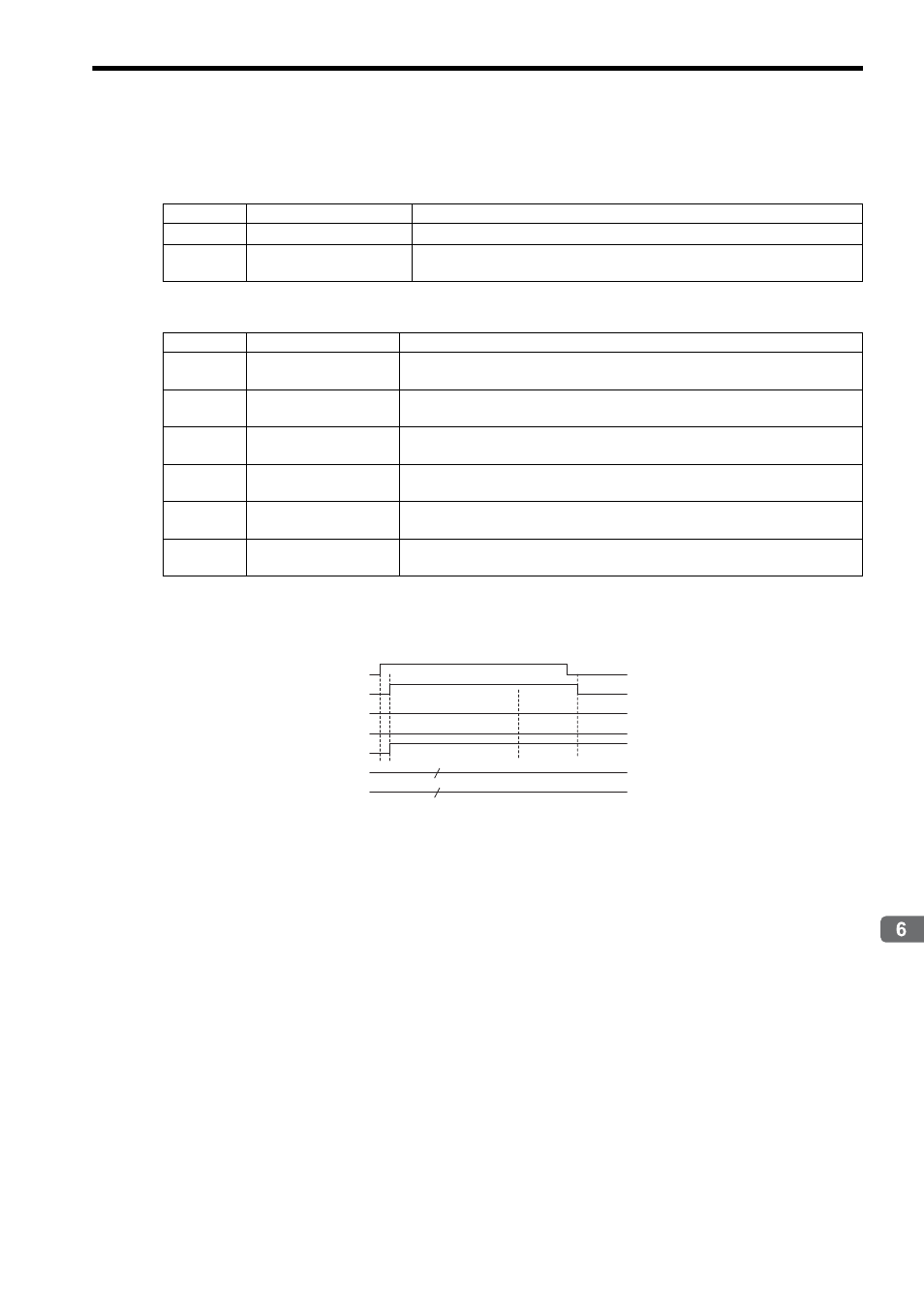
( 3 ) Timing Charts
[ a ] Normal End
Parameter
Name
Setting Contents
OW
0A
Motion Subcommand
The Monitor Status command is executed when this parameter is set to 4.
OW
4E
Servo User Monitor Set-
ting
Set the information managed by the Servo Driver to be monitored.
Parameter
Name
Monitoring Contents
IW
0A
Motion Subcommand
Response Code
Indicates the motion subcommand that is being executed.
The response code is 4 during SMON command execution.
IW
0B
Bit 0
Command Execution
Flag
Turns ON during SMON command execution and turns OFF when execution has
been completed.
IW
0B
Bit 3
Command Error
Completed Status
Turns ON if an error occurs during SMON command execution. Turns OFF when
another command is executed.
IW
0B
Bit 8
Command Execution
Completed
Turns ON when SMON command execution has been completed.
IW
2F
Servo Driver User
Monitor Information
Stores either the data actually being monitored in the user monitor or the monitor
selection.
IL
34
Servo Driver User Moni-
tor 4
Stores the result of the selected monitor operation.
OW
0A = 4 (SMON)
IW
0A = 4 (SMON)
IW
0B, bit 0 (BUSY)
IW
2F, bits12 to 15
Undefined
Monitor 4 = Set value
IW
0B, bit 8 (COMPLETE)
IW
0B, bit 3 (FAIL)
IL
34
Undefined
Monitoring result