Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 301
7.2 Motions After Switching Motion Commands
7.2.9 Switching from VELO
7-31
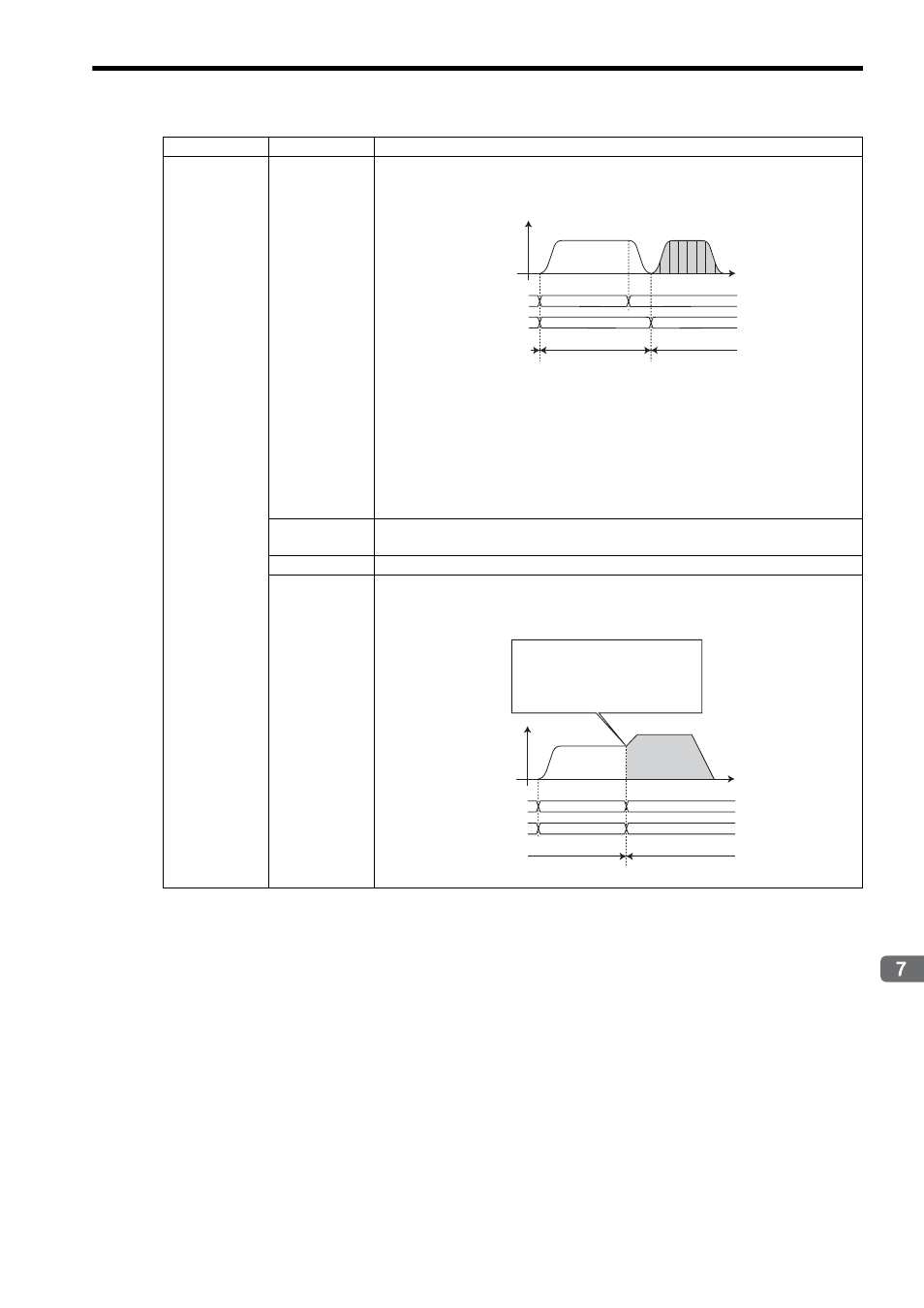
Switching Commands during Execution
VELO
INTERPOLATE
VELO will switch to INTERPOLATE when the axis stops after deceleration, and the con-
trol mode will change from speed control mode to position control mode after the axis
deceleration is completed.
<Change in Position Reference Setting (OL
1C) during Deceleration>
• In Incremental Addition Mode (OW
09, bit 5 = 0)
Any change in the Position Reference Setting (OL
1C) will be ignored.
• In Absolute Mode (OW
09, bit 5 = 1)
The change in Position Reference Setting (OL
1C) will be output as soon as the first
high-speed scan after INTERPOLATE execution starts.
Do not change the Position Reference Setting during deceleration unless it is
absolutely necessary.
ENDOF_INTER
POLATE
Same as INTERPOLATE
LATCH
Same as INTERPOLATE
FEED
VELO will immediately switch to FEED, and the control mode will change from speed
control mode to position control mode. The moving amount stored in the acceleration/
deceleration filter will be reset to 0.
Switched From
Switched To
Operation
VELO
VELO
INTERPOLATE
VELO
INTERPOLATE
INTERPOLATE
Motion command
Motion command
response
Speed control mode
Position control mode
VELO
VELO
FEED
VELO
FEED
FEED
Speed control mode
Position control mode
The speed will smoothly change.
(The speed at the time the motion command
is switched will increase/decrease until it
reaches the target speed of FEED.)
The acceleration/deceleration filter
will be cancelled.
Motion command
Motion command
response