2 switching from ex_posing – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 280
7.2 Motions After Switching Motion Commands
7.2.2 Switching from EX_POSING
7-10
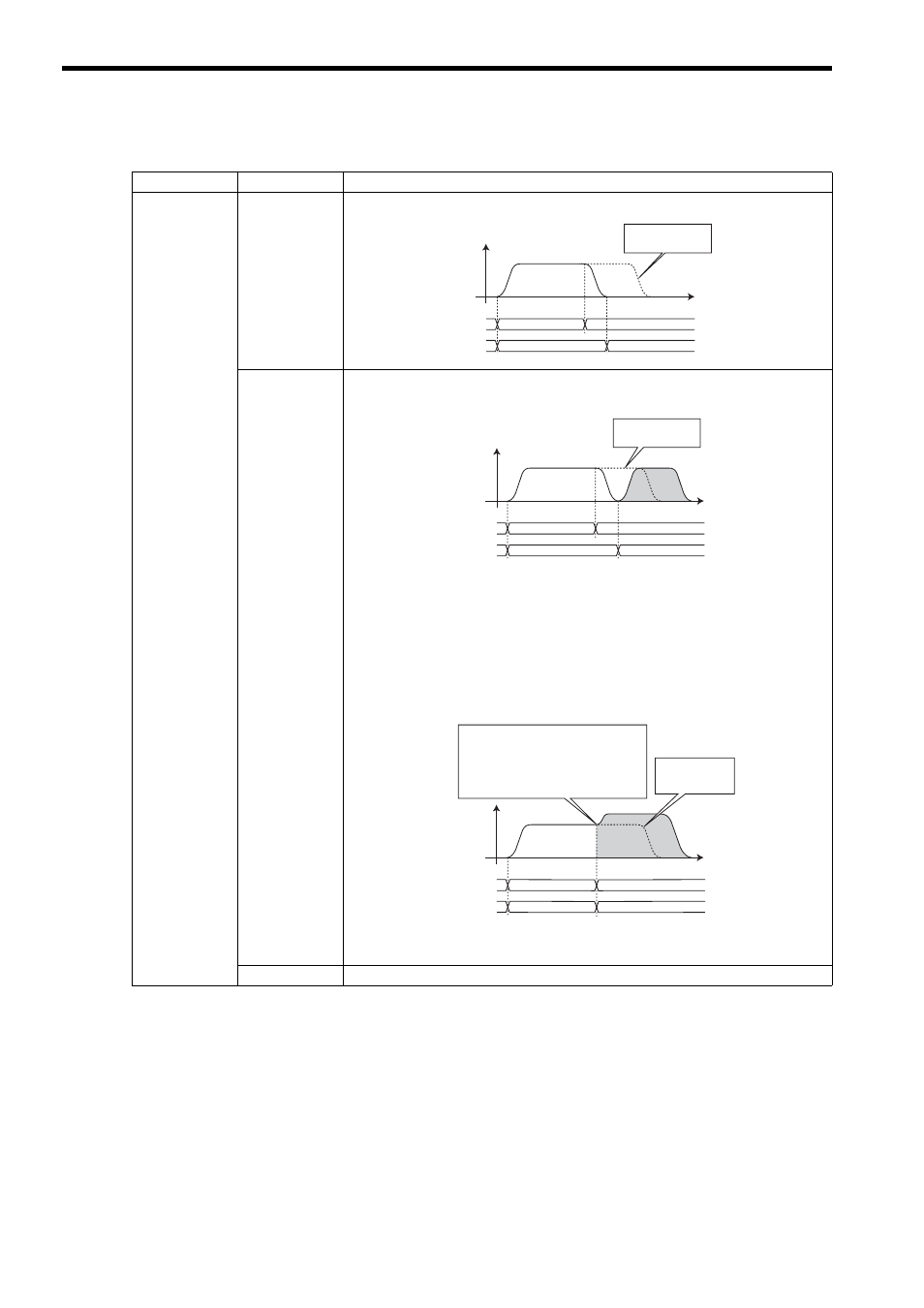
7.2.2 Switching from EX_POSING
Switched From
Switched To
Operation
EX_POSING
NOP
EX_POSING will switch to NOP when the axis stops after deceleration.
POSING
<In Incremental Addition Mode (OW
09, bit 5 = 0)>
EX_POSING will switch to POSING when the axis stops after deceleration.
Incremental value = Target position
− IL
14 (DPOS)
OL
1C = OL
1C + Incremental value
Any change in the Position Reference Setting (OL
1C) during deceleration
will be ignored.
<In Absolute Mode (OW
09, bit 5 = 1)>
EX_POSING will immediately switch to POSING, and the moving amount stored in the
acceleration/deceleration filter will be maintained.
The set value of the Position Reference Setting (OL
1C) will be:
OL
1C = Target position
EX_POSING
The EX_POSING operation will continue.
EX_POSING
Cancelled
EX_POSING
operation
EX_POSING
NOP
EX_POSING
NOP
Motion command
Motion command
response
Cancelled
EX_POSING
operation
EX_POSING
EX_POSING
POSING
EX_POSING
POSING
POSING
Motion command
Motion command
response
EX_POSING
Cancelled
EX_POSING
operation
EX_POSING
POSING
EX_POSING
POSING
The speed will smoothly change.
(The speed at the time the motion command
is switched will increase/decrease until it
reaches the target speed of POSING.)
The acceleration/deceleration filter will
remain valid.
POSING
Motion command
Motion command
response