4 status monitor (smon), 1 ) executing/operating procedure – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 267
6.4 Motion Subcommand Details
6.4.4 Status Monitor (SMON)
6-106
6.4.4 Status Monitor (SMON)
The SMON command stores, the data specified in Monitor 4 of the Servo User Monitor is stored in Servo Driver User
Monitor 4 (monitoring parameter IL
34).
This command will end with a Command Error Occurrence if it is executed with a communication method other than
MECHATROLINK-II 32-byte Mode.
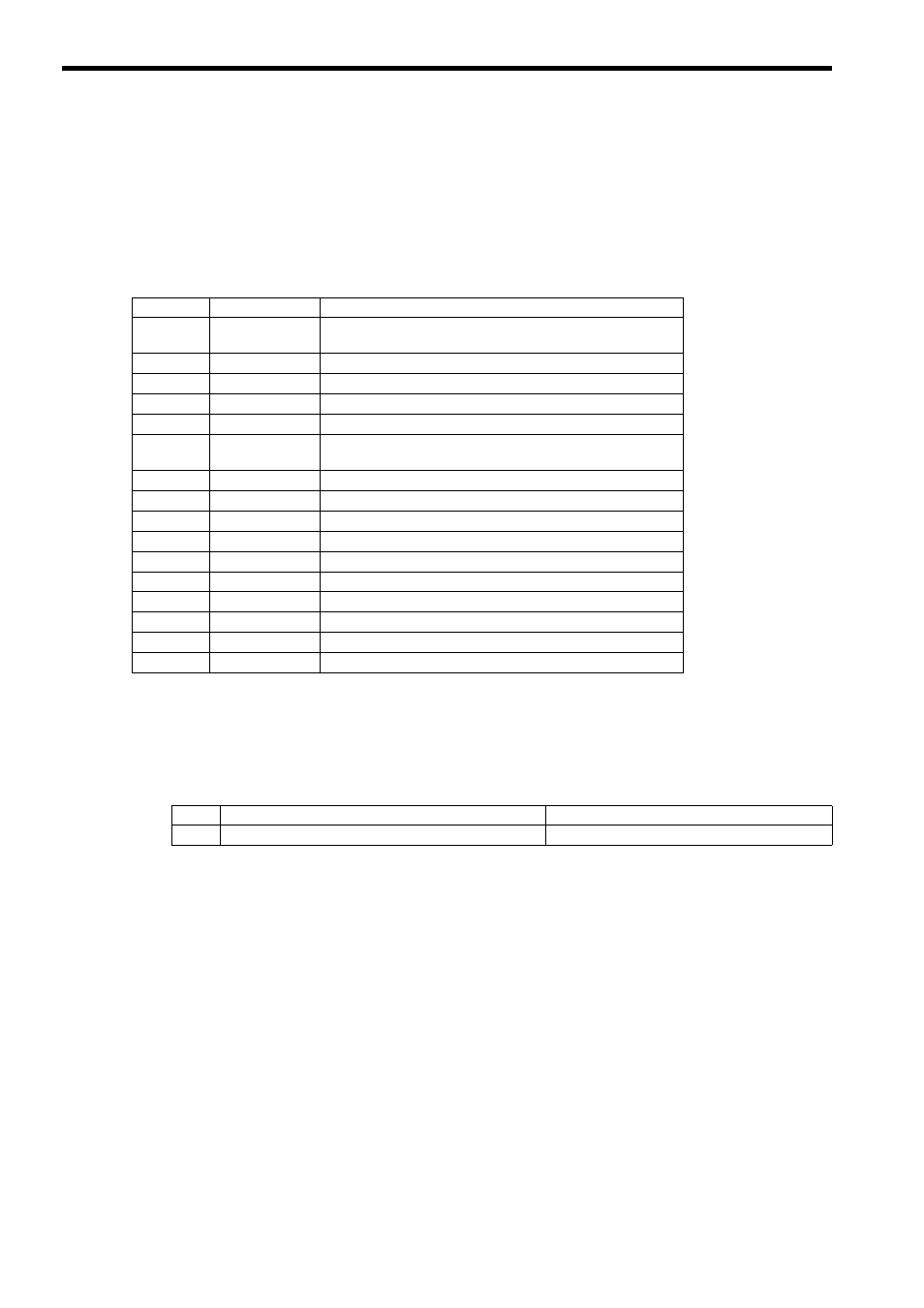
The following table shows the data that can be specified in the User Monitor.
Refer to your SERVOPACK’s users manual for details on the monitored data.
With some SERVOPACK models, not all items cannot be monitored.
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
2.
Set OW
0A to 4 to execute the SMON motion subcommand.
The SMON command will read the information managed by the Servo Driver and store the code in the monitor-
ing parameter.
IW
0A will be 4 during command execution.
IW
0B, bit 0 will turn ON during the command processing and will turn OFF when the command processing
has been completed.
3.
Set OW
0A to 0 to execute the NOP motion command and then complete the monitoring operation.
Set Value
Name
Description
0
POS
Reference coordinate system's reference position (after reference
filter)
1
MPOS
Machine coordinate system's reference position
2
PERR
Following error
3
APOS
Machine coordinate system's feedback position
4
LPOS
Machine coordinate system's feedback latch position
5
IPOS
Reference coordinate system's reference position (before reference
filter)
6
TPOS
Reference coordinate system's target position
7
−
−
8
FSPD
Feedback speed
9
CSPD
Reference speed
A
TSPD
Target speed
B
TRQ
Torque reference (Rated torque is 100%.)
C
−
−
D
−
−
E
OMN1
Optional monitor 1 (Actual content set in parameters.)
F
OMN2
Optional monitor 2 (Actual content set in parameters.)
No.
Execution Conditions
Confirmation Method
1
Motion subcommand execution has been completed.
IW
0A is 0 and IB
0B, bit0 is OFF.