3 ) monitoring parameters – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 329
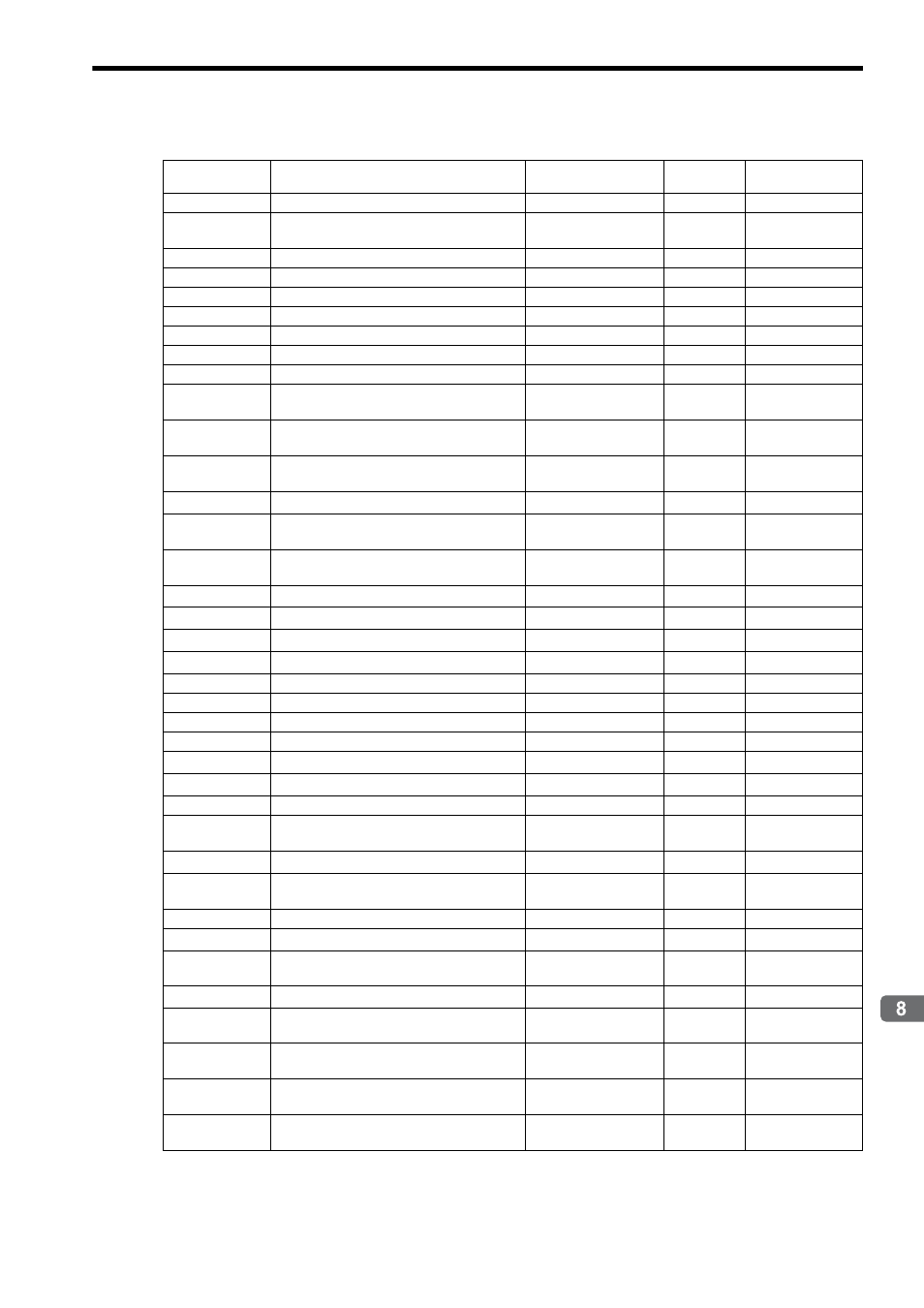
8.3 Torque Control
8.3.1 Motion Parameters for Torque Control
8-17
Control Block Diagrams
( 3 ) Monitoring Parameters
No.
Name
Unit
Default
Value
Range
IW
00
RUN Status
−
−
Bit setting
IW
01
Parameter Number When Range Over is
Generated
−
−
0 to 65535
IL
02
Warning
−
−
Bit setting
IL
04
Alarm
−
−
Bit setting
IW
08
Motion Command Response Code
−
−
0 to 65535
IW
09
Motion Command Status
−
−
Bit setting
IW
0A
Motion Subcommand Response Code
−
−
0 to 65535
IW
0B
Subcommand Status
−
−
Bit setting
IW
0C
Position Management Status
−
−
Bit setting
IL
0E
Target Position in Machine Coordinate
System (TPOS)
Reference unit
−
-2
31
to 2
31
−1
IL
10
Calculated Position in Machine
Coordinate System (CPOS)
Reference unit
−
-2
31
to 2
31
−1
IL
12
Machine Coordinate System Reference
Position (MPOS)
Reference unit
−
-2
31
to 2
31
−1
IL
14
CPOS for 32bit (DPOS)
Reference unit
−
-2
31
to 2
31
−1
IL
16
Machine Coordinate System Feedback
Position (APOS)
Reference unit
−
-2
31
to 2
31
−1
IL
18
Machine Coordinate System Latch
Position (LPOS)
Reference unit
−
-2
31
to 2
31
−1
IL
1A
Position Error (PERR)
Reference unit
−
-2
31
to 2
31
−1
IL
1C
Target Position Difference Monitor
Reference unit
−
-2
31
to 2
31
−1
IL
1E
Number of POSMAX Turns
Reference unit
−
-2
31
to 2
31
−1
IL
20
Speed Reference Output Monitor
pulse/s
−
-2
31
to 2
31
−1
IW
2C
Servo Driver Status
−
−
Bit setting
IW
2D
Servo Driver Alarm Code
−
−
-32768 to 32767
IW
2E
Servo Driver I/O Monitor
−
−
Bit setting
IW
2F
Servo Driver User Monitor Information
−
−
Bit setting
IL
30
Servo Driver User Monitor 2
−
−
-2
31
to 2
31
−1
IL
34
Servo Driver User Monitor 4
−
−
-2
31
to 2
31
−1
IW
36
Servo Driver User Constant No.
−
−
0 to 65535
IW
37
Supplementary Servo Driver User Con-
stant No.
−
−
0 to 65535
IL
38
Servo Driver User Constant Reading Data −
−
-2
31
to 2
31
−1
IL
3A
Supplementary Servo Driver User Con-
stant Reading Data
−
−
-2
31
to 2
31
−1
IW
3F
Motor Type
−
−
0, 1
IL
40
Feedback Speed
Depends on speed unit.
−
-2
31
to 2
31
−1
IL
42
Feedback Torque/Thrust
Depends on torque
unit.
−
-2
31
to 2
31
−1
IL
56
Fixed Parameter Monitor
−
−
-2
31
to 2
31
−1
IL
5E
Encoder Position When the Power is OFF
(Lower 2 words)
pulse
−
-2
31
to 2
31
−1
IL
60
Encoder Position When the Power is OFF
(Upper 2 words)
pulse
−
-2
31
to 2
31
−1
IL
62
Pulse Position When the Power is OFF
(Lower 2 words)
pulse
−
-2
31
to 2
31
−1
IL
64
Pulse Position When the Power is OFF
(Upper 2 words)
pulse
−
-2
31
to 2
31
−1