Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 307
7.2 Motions After Switching Motion Commands
7.2.10 Switching from TRQ
7-37
Switching Commands during Execution
TRQ
STEP
TRQ will immediately switch to STEP, and the control mode will change from torque con-
trol mode to position control mode. The moving amount stored in the acceleration/deceler-
ation filter will be reset to 0.
After TRQ is switched to STEP, the STEP command will be executed without
the acceleration/deceleration filter. To enable the acceleration/deceleration fil-
ter, hold the TRQ operation by executing an NOP command or other com-
mands. Then, when the Discharging Completed bit (IW
0C, bit 0) turns
ON, execute a STEP command.
ZSET
The axis will decelerate to a stop in position control mode. When the axis stops, ZSET
command execution will start.
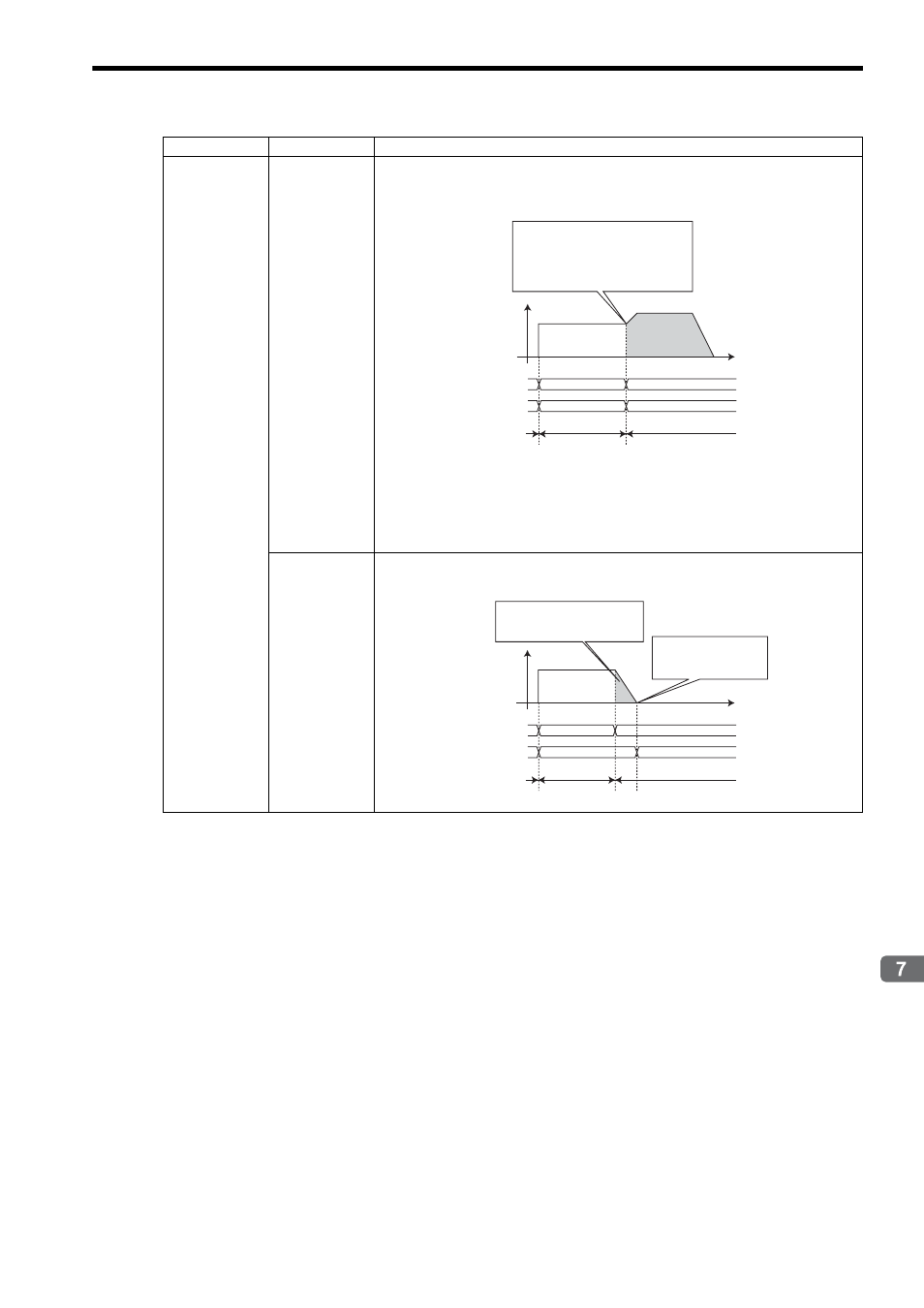
Switched From
Switched To
Operation
TRQ
STEP
TRQ
STEP
Torque control mode
Position control mode
TRQ
STEP
The speed will smoothly change.
(The speed at the time the motion com-
mand is switched will increase/decrease
until it reaches the target speed of STEP.)
The acceleration/deceleration filter will be
cancelled.
Motion command
Motion command
response
TRQ
ZSET
TRQ
ZSET
Torque control mode
Position control mode
TRQ
In position control mode, the axis
will decelerate to a stop from the
speed when the motion command
is switched.
A machine coordinate
system will be constructed
where the axis stops after
deceleration.
Motion command
Motion command
response