22 speed reference (velo), 1 ) executing/operating procedure, 2 ) holding – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 242
6.2 Motion Command Details
6.2.22 Speed Reference (VELO)
6-81
Motion Commands
6.2.22 Speed Reference (VELO)
With the MECHATROLINK-II, the VELO command is used to operate the SERVOPACK in the speed control mode
for the same type of operation as when using the analog speed reference input of the SERVOPACK.
The VELO command is stipulated in MECHATROLINK-II command specifications and cannot be used for MECHA-
TROLINK-I.
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
* This condition is a basic execution condition. Refer to Chapter 7 Switching Commands during Execution when
changing the command being executed to a VELO command.
2.
Set the following motion setting parameters.
Speed Reference Setting: OL
10
Positive Side Limiting Torque/Thrust Setting at the Speed Reference: OL
14
Filter Type Selection: OW
03, bits 8 to B
Speed Loop P/PI Switch: OW
01
The speed reference setting bit OL
10 can be changed during operation.
An override of between 0% to 327.67% can be set for the reference speed.
3.
Set OW
08 to 23 to execute the VELO motion command.
The control mode in the SERVOPACK will be switched to speed control.
IW
08 will be 23 during command execution.
This command can be executed even when the Servo is OFF.
Position management using the position feedback is possible during operation with speed control mode.
4.
Execute another motion command to cancel the speed control mode.
( 2 ) Holding
To pause the axis movement temporarily, and then restart movement, set the Holds a Command bit of the Motion Com-
mand Control Flag (OW
09, bit 0) to 1 (ON).
• The axis will decelerate to a stop when bit 0 of OW
09 is turned ON.
• When the axis stops, bit 1 (Command Hold Completed) of IW
09 (Motion Command Status) will turn ON.
• To cancel the holding status, set the bit 0 of OW
09 to 0 (OFF).
The holding status will be cancelled, and the axis will start moving again.
R
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
Both IL
02 and IL
04 are 0.
2
Motion command execution has been completed.
*
IW
08 is 0 and IW
09, bit0 is OFF.
0
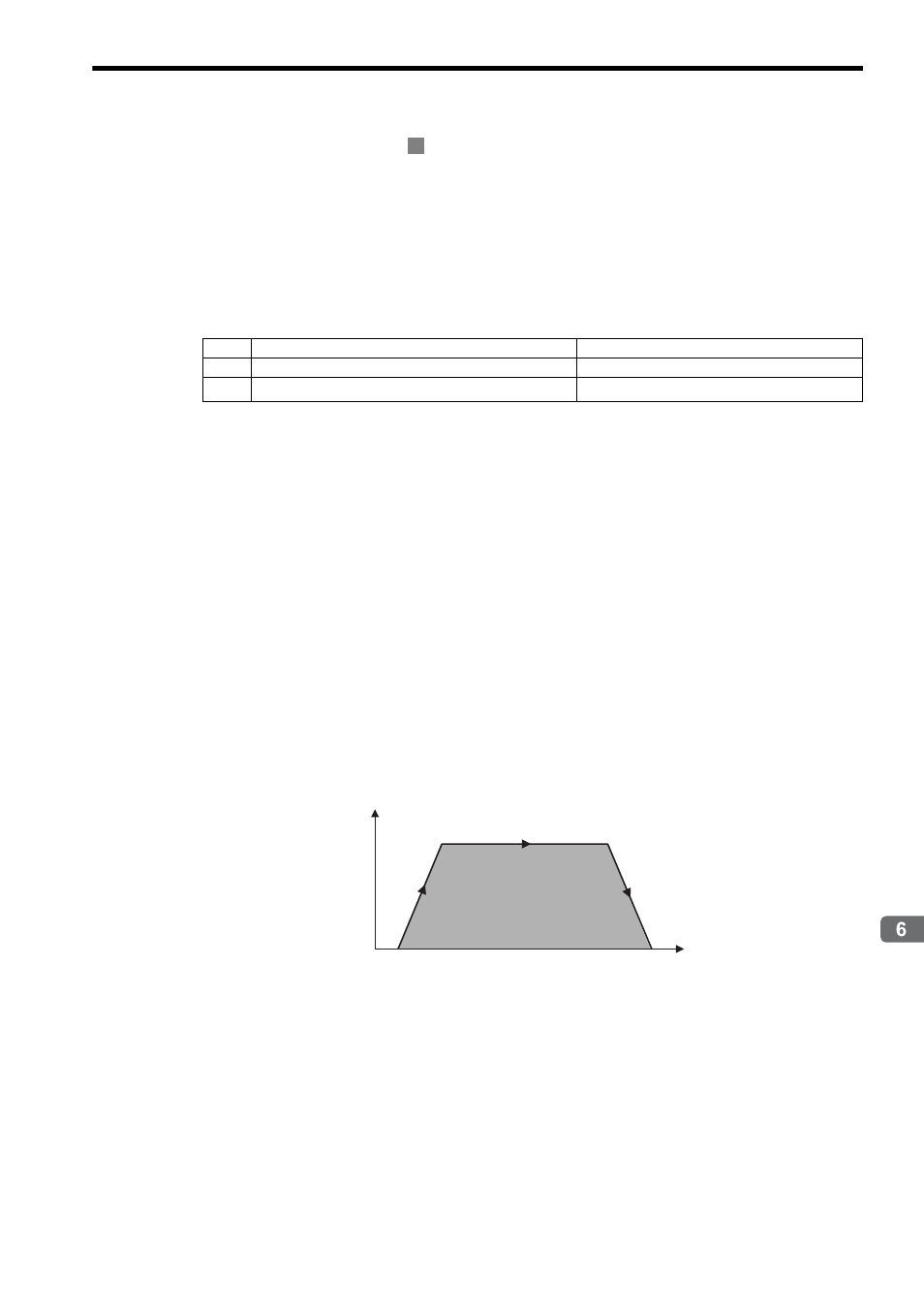
Speed (%)
Time (t)
VELO Operating Pattern