G.5 availability when using m-ii steppers, A-27, 1 ) limitation in motion command application – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 516
Appendix G Settings when Connecting MECHATROLINK-II Compatible Stepping Motor Drivers
G.5 Availability When Using M-II Steppers
A-27
Appendices
G.5
Availability When Using M-II Steppers
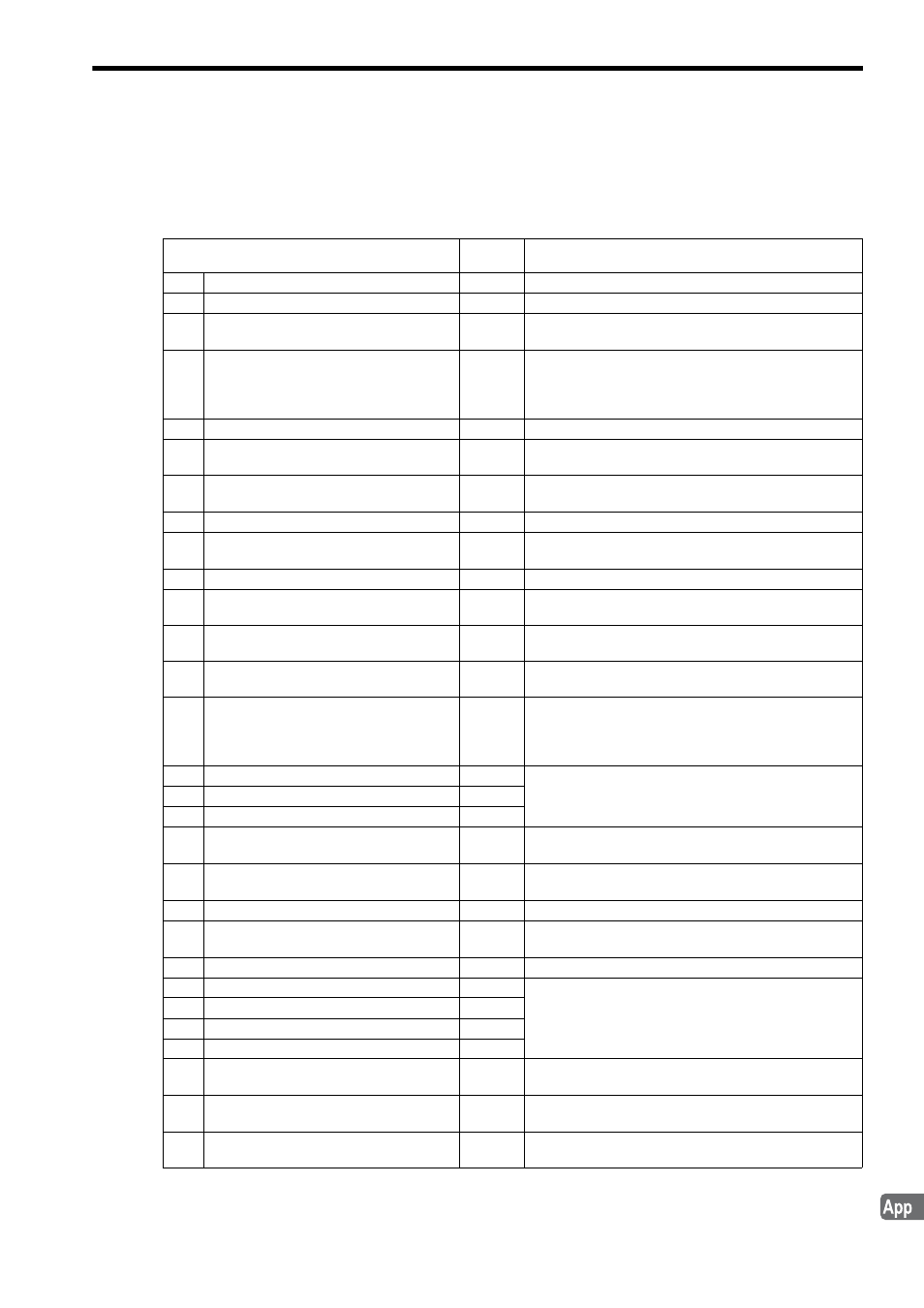
( 1 ) Limitation in Motion Command Application
For M-II Steppers, the applications of some motion commands are limited as follows.
: Applicable,
×: Not applicable, Δ: Limited application
Refer to G.6 Motion Command Details for details.
Motion Command
Applica-
tion
Description
0
No command (NOP)
−
1
Position Mode (POSING) (Positioning)
−
2
Latch Target Positioning (EX_POSING)
(External positioning)
The axis motion depends on the setting of the Parameter
Switch.
3
Zero Point Return (ZRET)
Δ
Zero Point Return Method (zero point return method selec-
tion) is invalid.
The axis motion depends on the setting of the Parameter
Switch.
4
Interpolation (INTERPOLATE)
−
5
Last Interpolation Segment
(ENDOF_INTERPOLATE)
−
6
Interpolation Mode with Latch Input
(LATCH)
−
7
Jog Mode (FEED)
−
8
Relative Position Mode (STEP)
(Step mode)
−
9
Set Zero Point (ZSET)
−
10
Change Acceleration Time (ACC)
The axis motion depends on the setting of the Parameter
Switch.
11
Change Deceleration Time (DCC)
The axis motion depends on the setting of the Parameter
Switch.
12
Change Filter Time Constant (SCC)
×
Invalid. If executed, a normal completion response will be
returned although no processing has been implemented.
13
Change Filter Type (CHG_FILTER)
×
Invalid. If executed, a normal completion response will be
returned although no processing has been implemented.
Use the Option Setting parameter OW
06 to select a filter
type.
14
Change Speed Loop Gain (KVS)
×
Invalid. If executed, a normal completion response will be
returned although no processing has been implemented.
15
Change Position Loop Gain (KPS)
×
16
Change Feed Forward (KFS)
×
17
Read User Constant
(PRM_RD)
−
18
Write User Constant
(PRM_WR)
−
19
Alarm Monitor (ALM_MON)
−
20
Alarm History Monitor
(ALM_HIST)
−
21
Clear Alarm History (ALMHIST_CLR)
−
22
Absolute Encoder Reset (ABS_RST)
×
Use is prohibited. If executed, the Command Error Com-
pleted Status bit will turn ON.
23
Speed Reference (VELO)
×
24
Torque/Thrust Reference (TRQ)
×
25
Phase Reference (PHASE)
×
26
Change Position Loop Integral Time
Constant (KIS)
×
Invalid. If executed, a normal completion response will be
returned although no processing has been implemented.
27
Stored Parameter Write
(PPRM_WR)
−
39
Multiturn Limit Setting (MLTTRN_SET)
×
Use is prohibited. If executed, the Command Error Com-
pleted Status bit will turn ON.