Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 358
9.4 Absolute Position Detection for Infinite Length Axes
9.4.5 Infinite Length Position Control without Simple Absolute Positions
9-21
Absolute Position Detection
( 4 ) Ladder Program for Infinite Length Axis Position Control
If the Simple Absolute Infinite Length Position Control Function is not used, a special ladder program is needed for
normal operation and for operation when system power is turned ON.
[ a ] Normal Operation
1.
Check the status of the Zero Point Return (Setting) Completed bit.
Check to see if the Zero Point Return (Setting) Completed bit (monitoring parameter IW
0C, bit 5) is ON. If
it is, go to step 2.
If it is not, it means that the pulse position at power OFF, encoder position at power OFF and all position data was
not settled. In that case, restart the system and set up the position data again or execute the ZSET (Set Zero Point)
motion command to settle the position data all over from the start.
2.
Save the modularized position at power OFF and absolute position at power OFF.
Use the ladder program to save the following monitoring parameters with high-speed scan timing at an M register
backed up by battery.
• Monitoring Parameter: Encoder Position when the Power is OFF (All four words at IL
5E to IL
60)
• Monitoring Parameter: Pulse Position when the Power is OFF (All four words at IL
62 to IL
64)
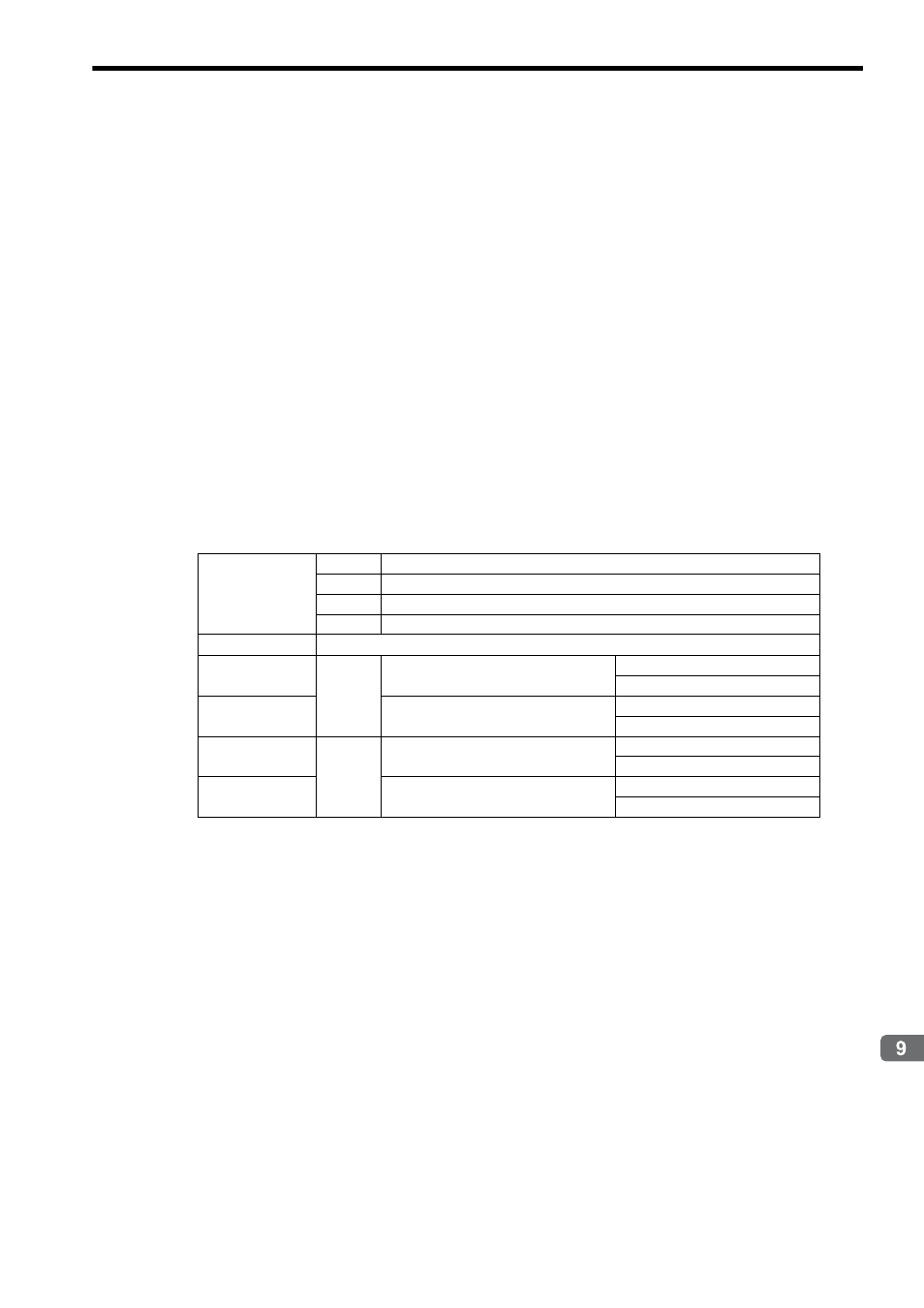
The M register that is used to save the above monitoring parameters is structured as shown below.
Two buffers are needed to save the encoder position and the pulse position at power OFF because the program
may be exited without settling position data at all four words if power is turned OFF during the high-speed scan.
MW
Bit 0
Toggle Buffer Enabled Flag (0: Disabled, 1: Enabled)
Bit 1
Toggle Buffer Selection Flag (0: Buffer 0, 1: Buffer 1)
Bit 2
Position Data Re-setup Request Flag (0: Complete, 1: Request)
Bit 3
Position Data Save Request Flag (0: Prohibited, 1: Request)
MW
+1
Not used
ML
+2
ML
+4
Buffer 0
Monitoring Parameter:
Encoder Position when the Power is OFF
Lower-place two words (IL
5E)
Upper-place two words (IL
60)
ML
+6
ML
+8
Monitoring Parameter:
Pulse Position when the power is OFF
Lower-place two words (IL
62)
Upper-place two words (IL
64)
ML
+10
ML
+12
Buffer 1
Monitoring Parameter:
Encoder Position when the Power is OFF
Lower-place two words (IL
5E)
Upper-place two words (IL
60)
ML
+14
ML
+16
Monitoring Parameter:
Pulse Position when the power is OFF
Lower-place two words (IL
62)
Upper-place two words (IL
64)