Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 153
5.1 Example Setting of Motion Parameters for the Machine
5.1.4 Position Reference
5-6
Setting of the target position when using an infinite length axis is described below.
( 1 ) Setting the Target Position When Using an Infinite Length Axis: Method 1
Executing a POSING command while no command (NOP) is being executed
• When the incremental addition mode is selected for the Position Reference Type (OW
09, bit 5 = 0), execute a
POSING command in distribution completed status (IW
0C, bit 0 = 1).
When the absolute mode is selected for the Position Reference Type (OW
09, bit 5 = 1), a POSING command can be exe-
cuted whether or not the distribution is completed (IW
0C, bit 0 = 0).
Incremental Addition Mode (OW
09, bit 5 = 0)
Incremental value = Target position (a value between 0 and POSMAX)
− IL
10 (CPOS) + POSMAX
× n
OL
1C = OL
1C + Incremental value
n refers to the number of POSMAX complete turns needed to move from the current position (CPOS) to the tar-
get position. When the distance between the target position and the current position is within the first turn, n is
0.
Absolute Mode (OW
09, bit 5 = 1)
Incremental value = Target position (a value between 0 and POSMAX)
− IL
10 (CPOS) + POSMAX
× n
OL
1C = IL
14 (DPOS) + Incremental value
n refers to the number of POSMAX complete turns needed to move from the current position (CPOS) to the tar-
get position. When the distance between the target position and the current position is within the first turn, n is
0.
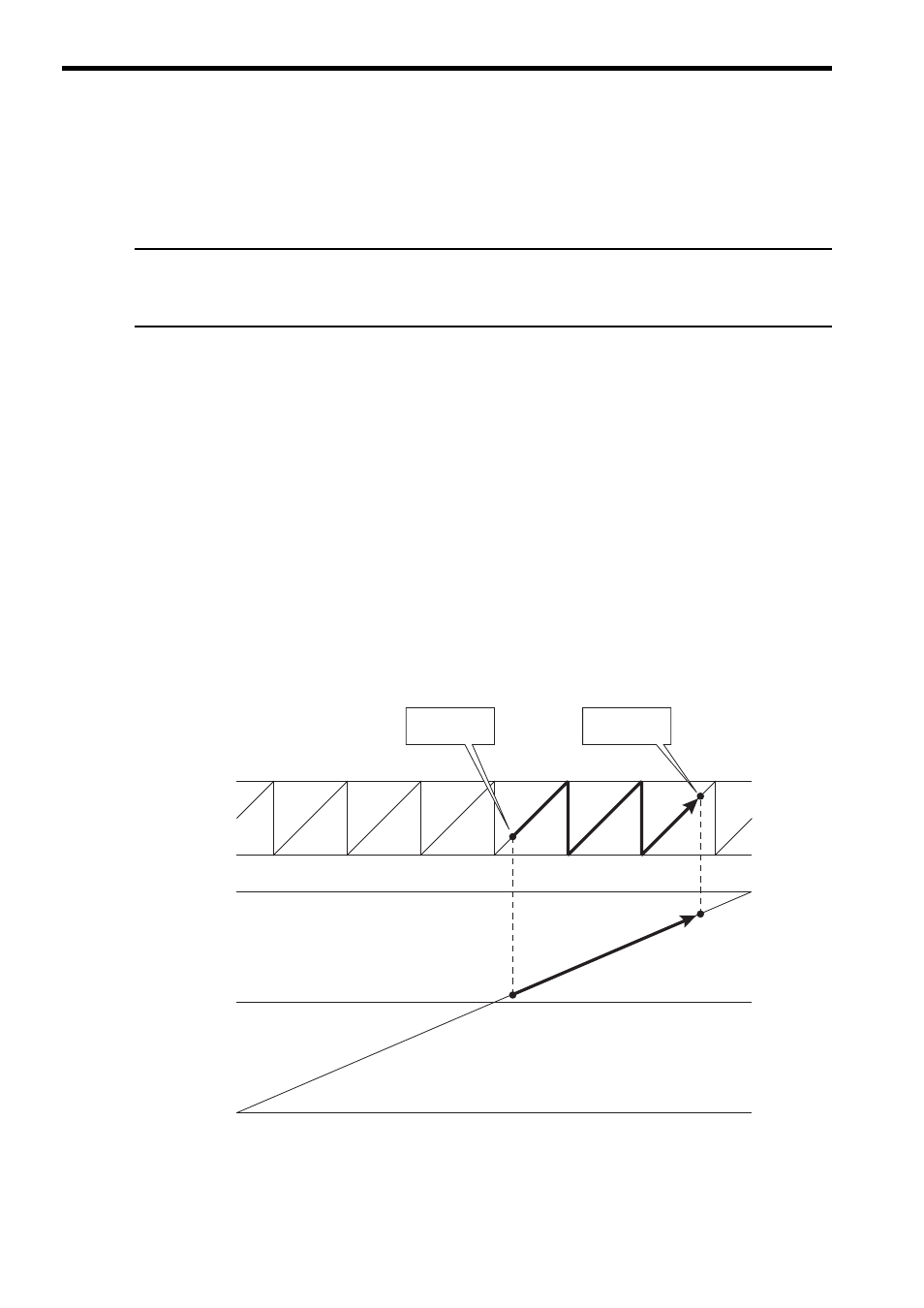
<Example when n = 2>
POSMAX
0
2
31
-1
0
-2
31
IL
10 (CPOS)
IL
12 (MPOS)
IL
16 (APOS)
IL
18 (LPOS)
IL
0E (TPOS)
IL
14 (DPOS)
Current position
(0 to POSMAX)
Target position
(0 to POSMAX)