Yaskawa SGDH Linear Sigma Series User Manual
Page 249
9.1 Trial Operation
9-5
9
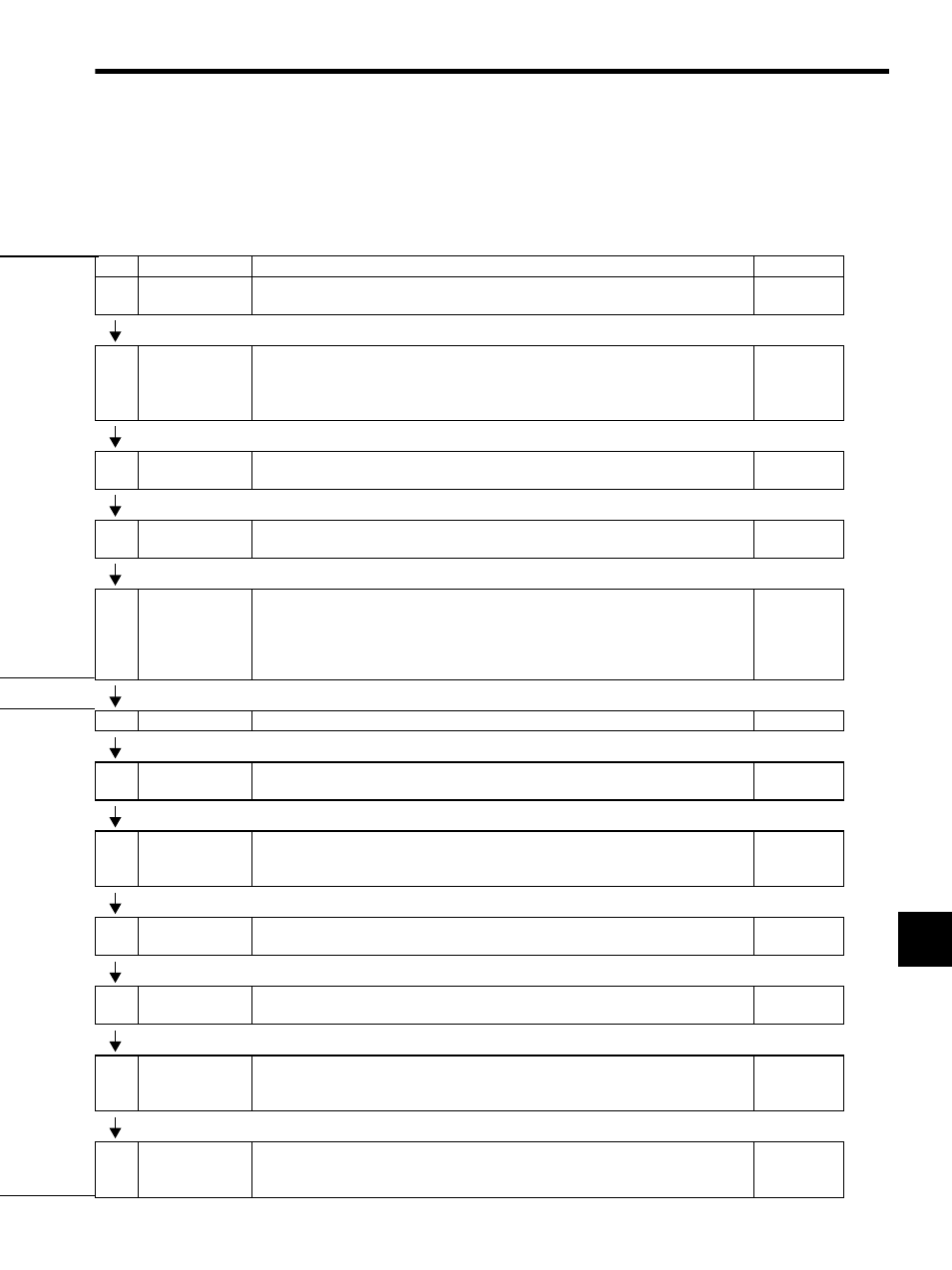
Step
Item
Description
Reference
1
Installation and
mounting
Install the linear servomotor and SERVOPACK according to the installation condi-
tions.
−
2
Wiring and
connections
Wire and connect the power supply circuit (L1, L2, or L1, L2, L3), linear servomotor
(U, V, W), input signal (CN1), and serial converter unit (CN2). Disconnect the CN1
connector during trial operation using SERVOPACK internal references (Refer to
9.2 Trial Operation Using SERVOPACK Internal References
−
3
Turn ON the
power.
Turn ON the power. Check the panel operator to make sure that the SERVOPACK is
running normally. The alarm A.08 does not indicate an error.
−
4
Linear scale
check
Set the linear scale pitch (Pn280). After setting validation, check the linear scale sta-
tus using the panel operator.
−
5
Polarity
detection
operation check
(only for
detection)
Check whether the polarity is being correctly detected.
−
6
Jog operation
After setting the mass ratio (Pn103), perform jog operation.
Jog operation
7
Connect input
signals.
Connect I/O signals (CN1) necessary for the trial operation to the SERVOPACK.
−
8
Check input
signals.
Check the input signals using the internal monitor function.
Turn ON the power, and check that the emergency stop, brake, overtravel, and other
protective functions are operating correctly.
−
9
Input servo ON
signal.
Input the servo ON signal, and turn ON the linear servomotor.
Host
reference
10
Input reference
Input the reference for the control mode being used, and check that the linear servo-
motor is operating normally.
Host
reference
11
Set necessary
parameters.
Run the linear servomotor from the host controller in the same way as in step 10, and
set the required parameters so that the machine movement direction, movement dis-
tance, and movement speed are the same as the references.
Host
reference
12
Operation
The linear servomotor can now be run. Adjust the servo gain if necessary. Refer to
10.1 Autotuning. If an error occurs, refer to Section 11 Inspection, Maintenance, and
Troubleshooting.
Host
reference