Yaskawa SGDH Linear Sigma Series User Manual
Page 262
9 Operation
9.2.3 Setup Procedure Using Linear Servomotors without Hall Sensors
9-18
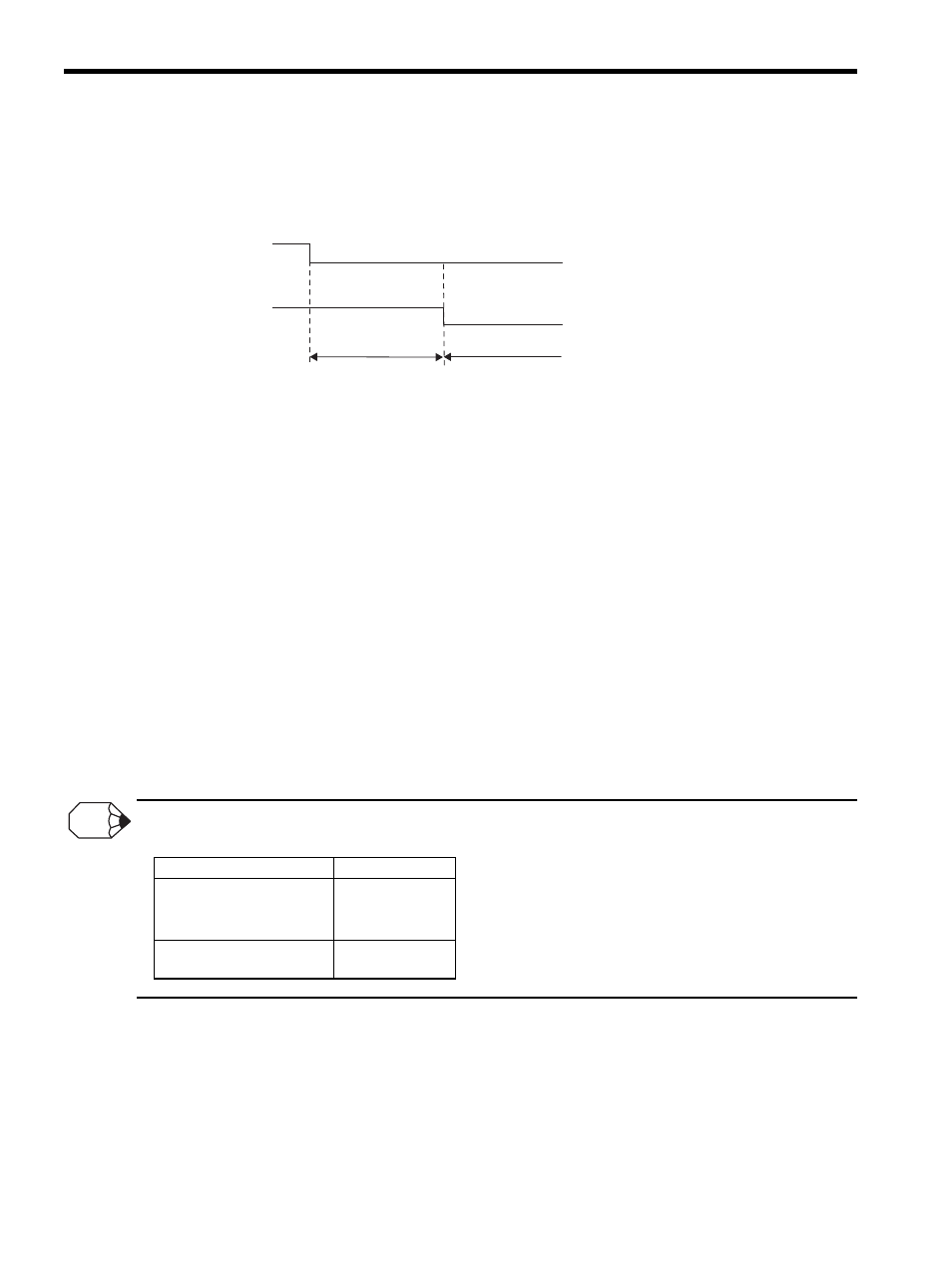
(a) Polarity Detection Completion Timing
Polarity detection is performed when the /S-ON signal (/P-DET signal for /P-DET signal assignment) is
input after turning ON the control power and main circuit power. During detection, the status display is P-dt,
and the /S-RDY signal turns ON when completed.
(b) Checking whether Detection is Normal
• Simple Confirmation
After turning ON both the control power and main circuit power, input the /S-ON signal (Use /P-DET signal
when using the polarity detection start signal) and perform polarity detection. When the display on the panel
operator or digital operator is bb when the power is turned ON, the display will change to P-dt during polar-
ity detection, and return to bb after completion.
After detection is completed, push the linear servomotor down on the stroke end and check the electrical
angle in monitor mode parameter Un004 (electrical angle 2: Phase U, angle from 0
°). After confirmation,
remove the linear servomotor from the stroke end (10 mm min.) Then execute the setting validation, and
restart polarity detection. Repeat this procedure three times. If the deviation of the electrical angle is within
±10°, the polarity detection is normal. However, the polarity detection operation will change slightly depend-
ing on the detection location, perform the following detailed check at the end.
• Detailed Confirmation
Based on the user-set position, measure the electrical angles using monitor mode parameter Un004 (electrical
angle 2: Phase U, angle from 0) when polarity detection is performed at 30 points each 1.5 mm apart. If the
electrical angles are in the relationship 12
° ±10, the measurement results indicate the normal polarity detec-
tion.
The following table shows the position intervals used to perform polarity detection when the following linear servomotor
models are used.
Polarity detection
→
Status display: P-dt
Polarity detection completed
→
Normal operation possible
/S-ON input
(/P-DET)
/S-RDY output
Linear Servomotor Model
Position Interval
SGLGW-30
SGLFW-20
SGLTW-20
1.2 mm
(0.047 in)
SGLGW-90
2.8 mm
(0.11 in)
INFO