Yaskawa SGDH Linear Sigma Series User Manual
Page 355
11.1 Troubleshooting
11-3
11
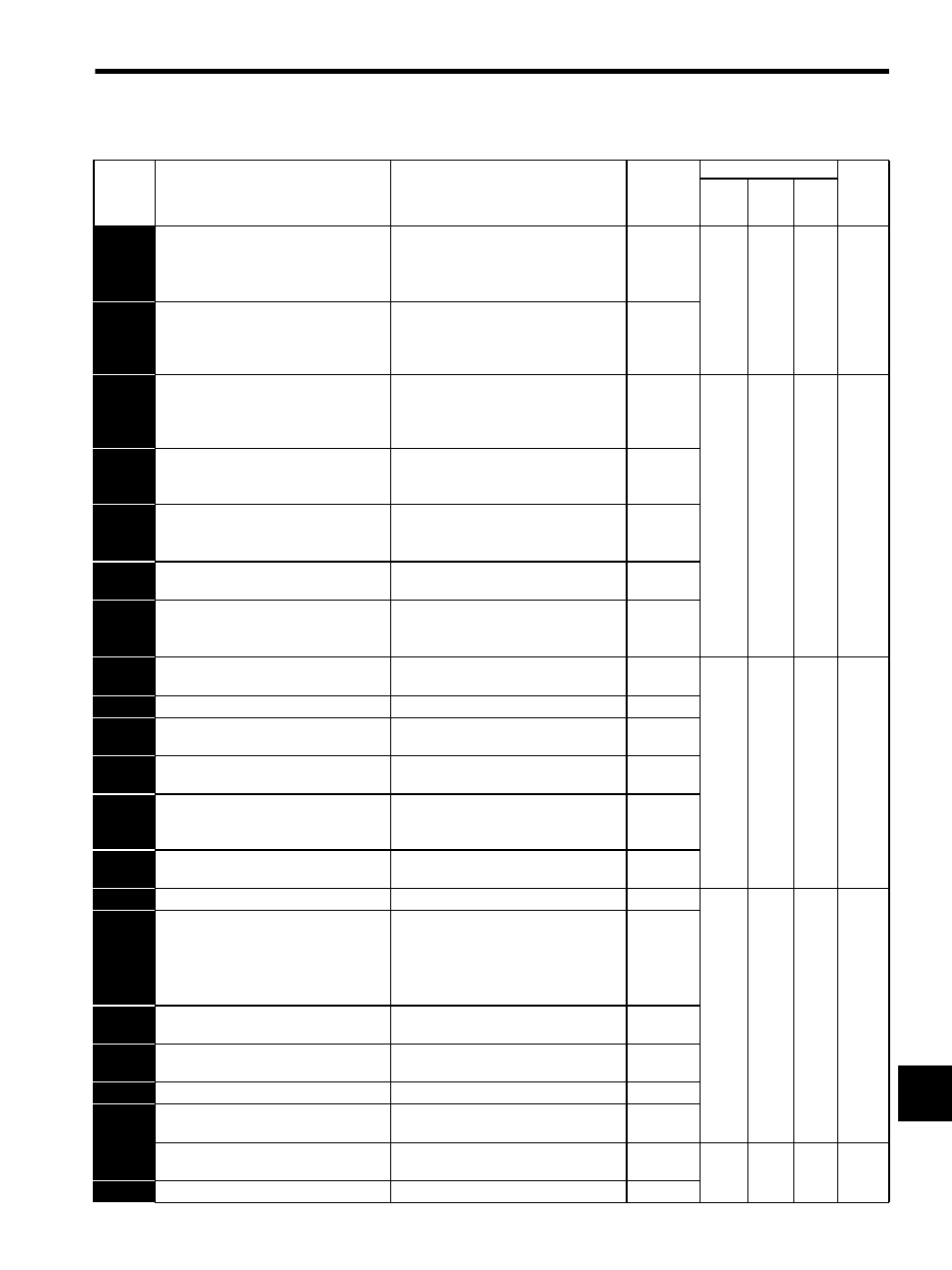
A.51
Overspeed
• The motor speed is excessively
high.
• The divided output frequency
exceeds 15 MHz.
Available
L
H
L
H
A.55
Linear Servomotor Peak Speed Setting
Error
*1
When connecting the linear servomo-
tor, a value higher than the linear ser-
vomotor peak speed was set for
Pn384.
Available
A.71
Overload: High Load
The motor was operating for several
seconds to several tens of seconds
under a force largely exceeding rat-
ings.
Available
L
L
L
H
A.72
Overload: Low Load
The motor was operating continuously
under a force largely exceeding rat-
ings.
Available
A.73
Dynamic Brake Overload
(Not detected for the SERVOPACKs
with the capacity of 50 W to 1.0 kW.)
When the dynamic brake was applied,
kinetic energy exceeded the capacity
of dynamic brake resistor.
Available
A.74
Overload of Surge
Current Limit Resistor
The main circuit power was frequently
turned ON and OFF.
Available
A.7A
Heat Sink Overheated
(Not detected for the SERVOPACKs
with the capacity of 50 W to 1.0 kW.)
The heat sink of SERVOPACK over-
heated.
Available
A.82
Encoder Checksum Error
The checksum results of encoder
memory is abnormal.
N/A
H
H
H
H
A.84
Encoder Data Error
Data in the encoder is abnormal.
N/A
A.b1
Reference Speed Input Read Error
The A/D converter for reference speed
input is faulty.
Available
A.b2
Reference Force Input Read Error
The A/D converter for reference force
input is faulty.
Available
A.b3
Current Detection Error
*1
Current sensor error was detected or
linear servomotor line was discon-
nected.
Available
A.bF
System Alarm
A system error occurred in the SER-
VOPACK.
N/A
A.C1
Servo Overrun Detected
The servomotor ran out of control.
Available
L
H
L
H
A.C2
Phase Faulty Detection Alarm
• The electrical angle at the hall sen-
sor phase-U edge deviated for
±
40
degrees or more.
• Hall sensor signal error was
detected.
N/A
A.C5
Linear Servomotor Pole Detection
Error
The polarity of linear servomotor can
not be detected.
Available
A.C9
Encoder Communications Error
Communications between SERVO-
PACK and encoder is not possible.
N/A
A.CA
Encoder Parameter Error
Encoder parameters are faulty.
N/A
A.Cb
Encoder Echoback Error
Contents of communications with
encoder is incorrect.
N/A
A.d0
Position Error Pulse Overflow
Position error pulse exceeded parame-
ter (Pn505).
Available
L
L
H
H
A.d3
Exceeded Position Data
Position data is 32-bit or more.
N/A
Table 11.1 Alarm Displays and Outputs (Cont’d)
Alarm
Display
Alarm Name
Meaning
Alarm
Reset
Alarm Code Output
Servo
Alarm
(ALM)
Output
ALO1
ALO2
ALO3