4 selecting the stopping method after servo off – Yaskawa SGDH Linear Sigma Series User Manual
Page 278
9 Operation
9.6.4 Selecting the Stopping Method After Servo OFF
9-34
9.6.4 Selecting the Stopping Method After Servo OFF
The stopping method when the power to the SERVOPACK turns OFF can be selected.
The dynamic brake (DB)
1
is an emergency stop function.
If the servomotor is frequently started and stopped by turning the power ON/OFF or using the servo ON sig-
nal (/S-ON), the DB circuit will also be repeatedly operated, degrading the SERVOPACK’s internal ele-
ments. Use the speed input reference and position reference to control the starting and stopping of the
servomotor.
Parameter
Stop Mode
Mode After
Stopping
Meaning
Pn001
n.0
Stop by dynamic
brake
Dynamic Brake
Stops the linear servomotor by dynamic braking
(DB), then holds it in Dynamic Brake Mode. (Fac-
tory setting)
n.1
Coast
Stops the servomotor by dynamic braking (DB),
then places it into Coast (power OFF) Mode.
n.2
Coast to a stop
Coast
Stops the servomotor by coasting, then places it
into Coast (power OFF) Mode.
These parameters are valid under the following conditions:
• When the /S-ON input signal is OFF (Servo OFF).
• When an alarm occurs.
• When main circuit power supply (L1, L2, L3) is OFF. (Some linear servomotor models are forcibly stopped by dynamic
braking.)
Similar to the Coast Mode, the n.0 setting (which stops the servomotor by dynamic braking and then holds it in
Dynamic Brake Mode) does not generate any braking force when the servomotor stops or when it runs at very low speed.
TERMS
• Stop by dynamic brake: Stops by using the dynamic brake (with short-circuiting by a circuit of SERVOPACK).
• Coast to a stop: Stops naturally, with no brake, by using the friction resistance of the motor in operation.
IMPORTANT
The linear servomotor is forced to stop by dynamic braking, regardless of the settings of this parameter, when the main
circuit power supply (L1, L2, L3) or control power supply (L1C, L2C) turns OFF.
• SGDH-A5AE to -15AE (50 W to 1.5 kW for 200 V)
• SGDH-10DE to -75DE (1.0 kw to 7.5 kW for 400 V)
If the linear servomotor must be stopped by coasting rather than by dynamic braking when the main circuit power supply
(L1, L2, L3) or the control power supply (L1C, L2C) turns OFF, arrange the sequence externally so the linear servomotor
wiring (U, V, W) will be interrupted.
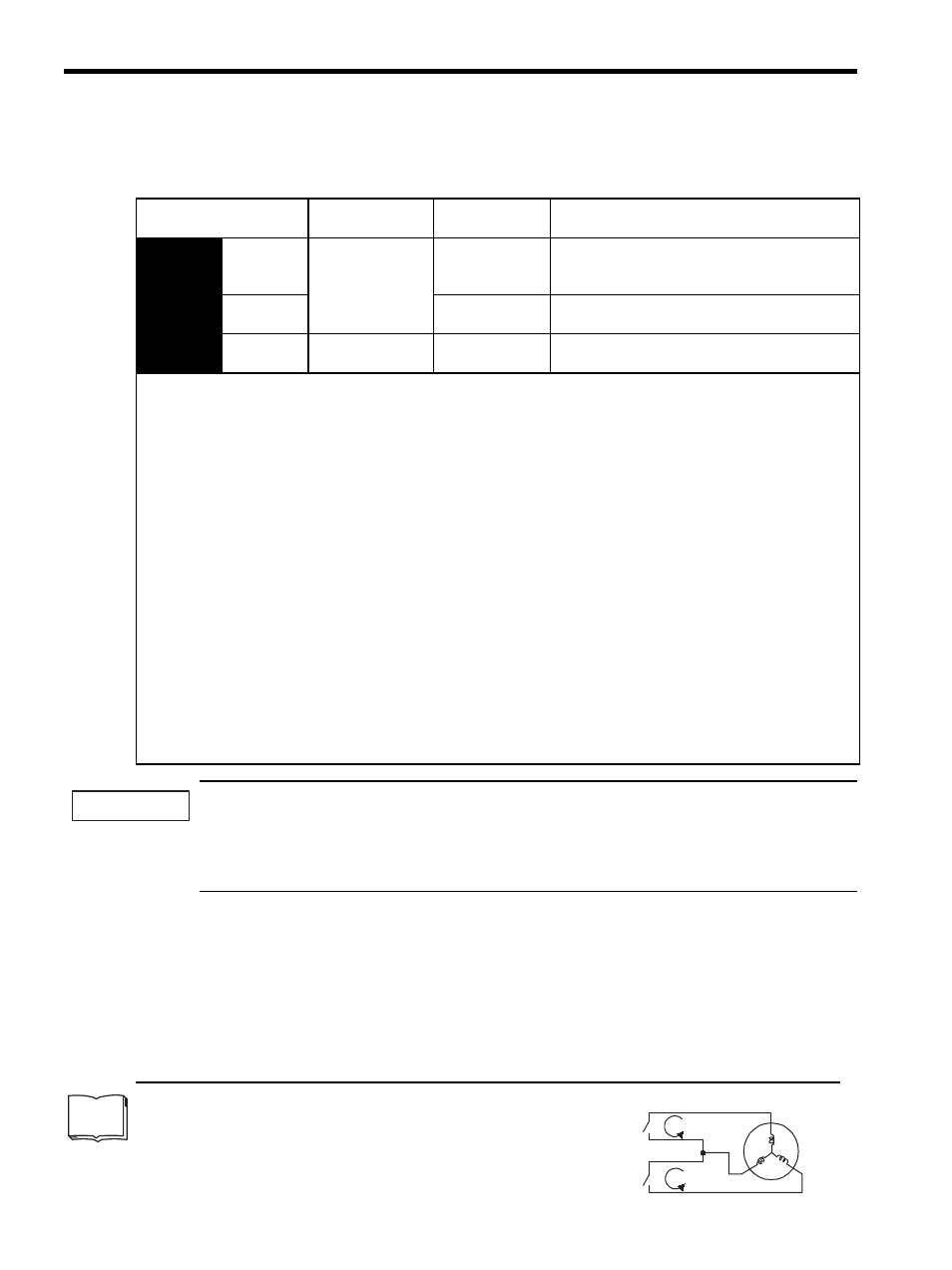
1
Dynamic brake (DB)
A common method for quickly stopping a servomotor. The servomotor is stopped
by short-circuiting the servomotor circuit. This circuit is built into the SERVO-
PACK.
IMPORTANT
SERVOPACK
Servomotor
TERMS