Yaskawa JAPMC-MC2300 User Manual
Page 105
5.4 MP2000 Series Machine Controller Parameter Details
5.4.2 Motion Setting Parameter Details
5-33
5
Motion Parameters
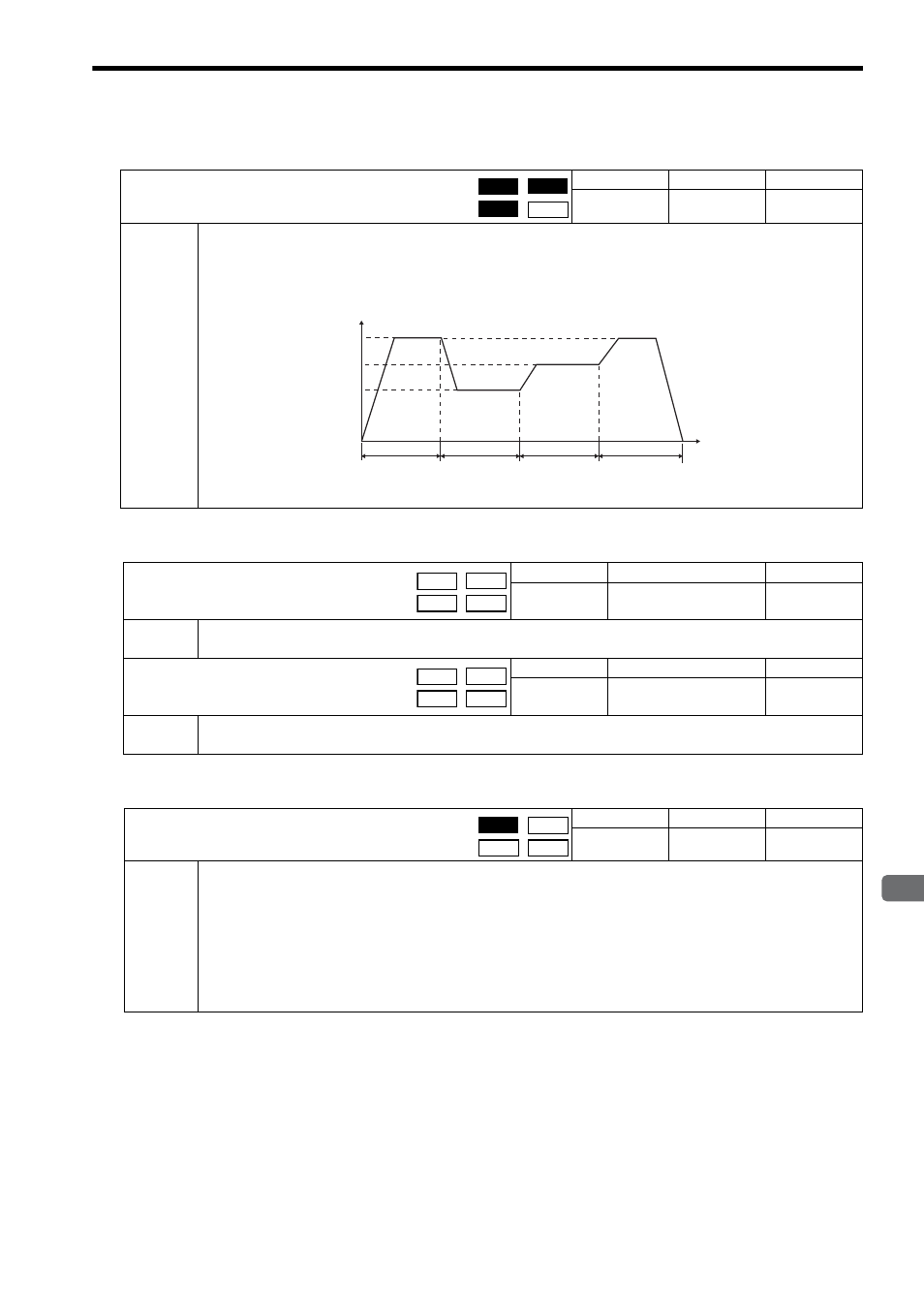
( 13 ) Speed Override
( 14 ) General-purpose AO
( 15 ) Position Reference Setting
OW
18
Override
Setting Range
Setting Unit
Default Value
0 to 32767
0.01%
10000
Description
Set the percentage of the Speed Reference Setting (OL
10) to output in units of 0.01%.
The override value is always enabled. Set to 10000 (fixed) when not using the override function.
Speed Reference Setting (OL
10)
× Override (OW
18) = Output speed
This parameter can be changed at any time to any value during execution of speed reference, and acceleration/decelera-
tion is performed immediately according to the set value.
When the speed override is set to 0, the output speed is 0 and the motor will not operate.
OW
1A
General-purpose AO1
Setting Range
Setting Unit
Default Value
−10000 to
+10000
0.001 V
0
Description
The analog data set in this parameter is output.
This parameter is valid only in general-purpose I/O mode.
OW
1B
General-purpose AO2
Setting Range
Setting Unit
Default Value
−10000 to
+10000
0.001 V
0
Description
The analog data set in this parameter is output.
This parameter is valid only in general-purpose I/O mode.
OL
1C
Position Reference Setting
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Description
Set the position reference.
This parameter is used for the following motion commands.
1: POSING
2: EX_POSING
4: INTERPOLATE
6: LATCH
Positioning
External Positioning
Interpolation
Latch
Related Parameters
OW
09, bit 5: Position Reference Type
Position
Phase
Speed
Torque
50%
75%
100%
5000
7500
10000
10000
Speed
Override set value
Time
Position
Phase
Speed Torque
Position
Phase
Speed Torque
Position
Phase
Speed Torque