2 ) parameter settings – Yaskawa JAPMC-MC2300 User Manual
Page 305
11.1 Controlling Vertical Axes
11.1.3 Connections to
Σ-I Series SGDB SERVOPACK
11-5
11
Utility Functions
( 2 ) Parameter Settings
The SERVOPACK parameters related to control the holding brake are described below.
Parameter
Name
Unit
Setting/Range
Default
Control Mode
Cn-2D
OUTSEL Output Signal Selection
–
110 to 666
210
Speed, torque, position control
Details
The following parameter determines which pin of the 1CN will be used to output the /BK signal (4 in the lower
right column). In the figure above, 4 is allocated to the 2nd digit and the setting is 4 . So, the /BK signal is out-
put to pins 27 and 28.
Allocation
1st digit: CN1-25, 26 (Factory setting: 0)
2nd digit: CN1-27, 28 (Factory setting: 1)
3rd digit: CN1-29, 30 (Factory setting: 2)
Set Value and Function
0: /COIN/ /V-CMP (Valid only at the 1st digit.)
1: /TGON
2: /S-RDY
3: /CLT
4: /BK
5: OL warning
6: OL alarm
Parameter
Name
Unit
Setting/Range
Default
Control Mode
Cn-12
Brake ON Timing after Motor Stops
10 ms
0 to 50
0
Speed, torque, position control
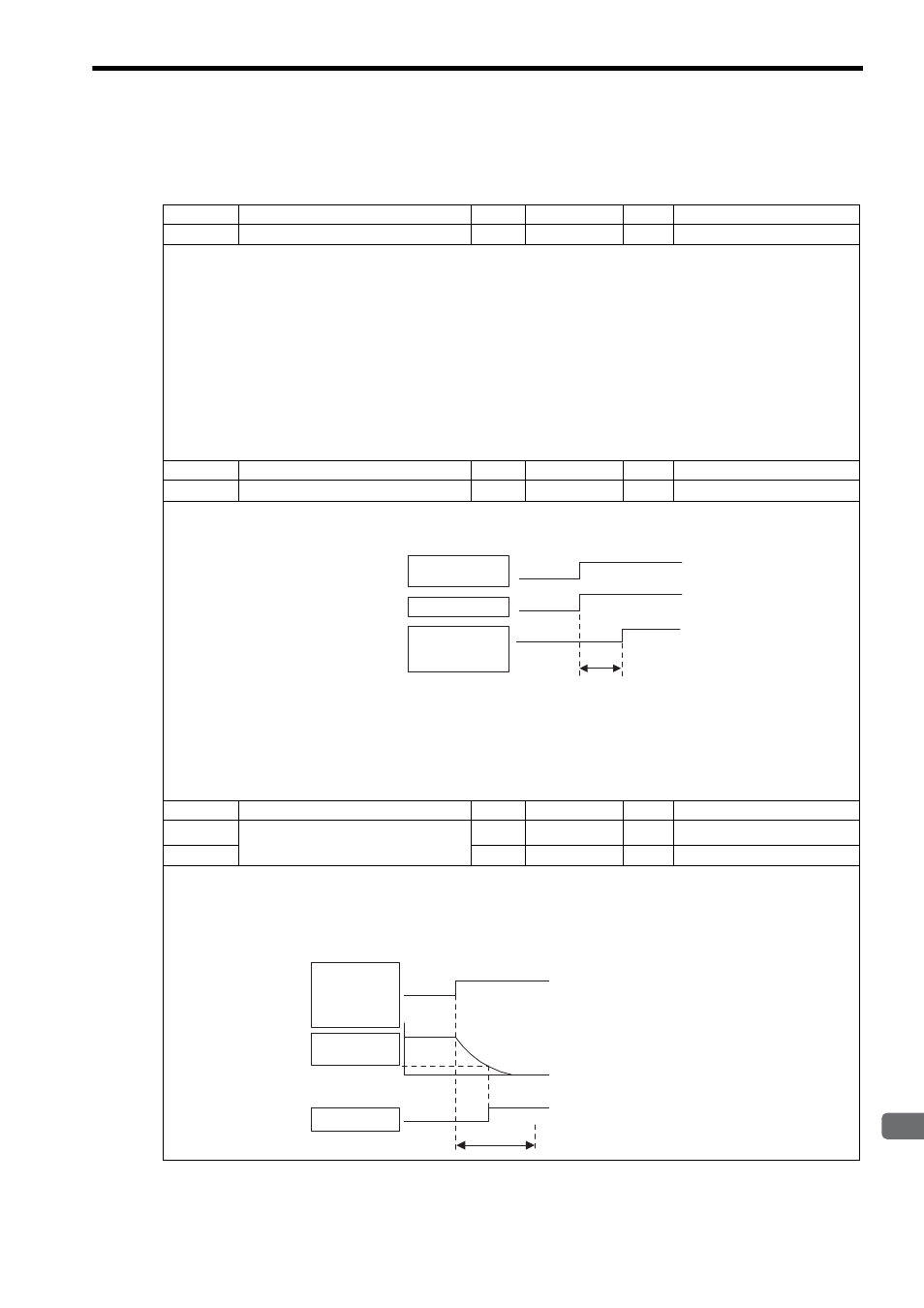
Details
This parameter adjusts the Delay Time from /BK Signal Output until Servo OFF (stopping Servomotor output), and
it is used to be set when the machine moves slightly due to gravity or other factors after turning the brake ON.
This parameter is used to set the timing when the motor is stopped. Brake operation while the motor
is running is set in Cn-15 and Cn-16.
For the standard settings, the Servo will turn OFF simultaneously with the /BK output (Brake Opera-
tion). If gravity causes the machine to move slightly at this time due to machine configuration or
brake characteristics, turning OFF the Servo can be delayed to reduce the movement.
Parameter
Name
Unit
Setting/Range
Default
Control Mode
Cn-15
Brake ON Timing when Motor
Running
min
−1
0 to max. speed
100
Speed, torque, position control
Cn-16
10 ms
0 to 100
50
Speed, torque, position control
Details
Cn-15: Speed Level for BK Signal Output when Motor Running
Cn-16: Timing of BK Signal Output when Motor Running
These settings are used to set the timing for applying the brake when the Servo turns OFF due to an /S-ON input
signal or alarm.
/S-ON input
/BK output
Servo ON
Motor ON
Brake holding
Servo OFF
Cn-12
Servo ON/OFF
operation (motor
ON status)
Brake
released
Motor
OFF
Servo OFF
delay time
Cn-15
/BK output
Servo ON
Servo OFF
Cn-16
Brake holding
/S-ON input or
alarm occurred.
Power OFF
Motor speed
(min
−1
)
Stop with dynamic
brake or by coasting
(Cn0001 bit 6)
Brake
released
The brake on the Servomotor is
designed as a holding brake and it
must be applied only after the motor
has stopped. Adjust this parameter
while observing machine operation.