Yaskawa JAPMC-MC2300 User Manual
Page 253
8.1 Switchable Motion Commands
8.1.10 Switching from VELO
8-26
VELO
EX_POSING
VELO will immediately switch to EX_POSING, and the control mode will be changed
from speed control mode to position control mode. The moving amount stored in the
accel/decel filter will be reset to 0.
The value of the Position Reference Setting (OL
1C) when the motion command is
switched will be as follows.
<In Incremental Addition Mode (OW
09, bit 5 = 0)>
Incremental value = Target position
− IL
14 (DPOS)
OL
1C = OL
1C+ Incremental value
<In Absolute Mode (OW
09, bit 5 = 1)>
OL
1C = Target position
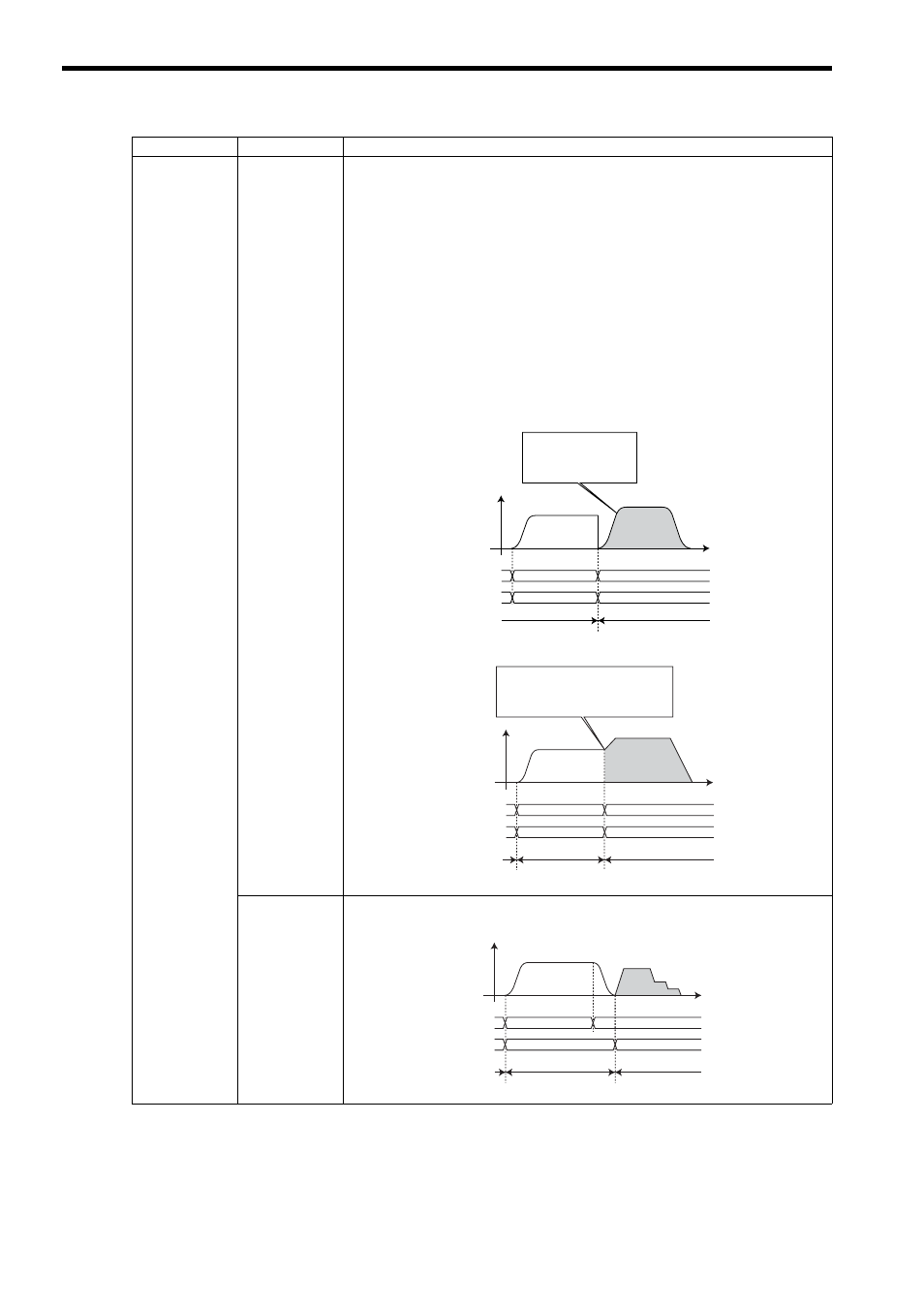
EX_POSING switched from VELO starts its operation with the empty accel/
decel filter. Therefore, when the accel/decel filter is set for EX_POSING com-
mand, the speed will not smoothly change, and the distribution will be started
from the state Speed = 0 (see (1).) To change the speed smoothly, do not set
the filter for EX_POSING command (see (2).)
(1) When Using the Accel/Decel Filter for EX_POSING Command
(2) When Not Using the Accel/Decel Filter for EX_POSING Command
ZRET
VELO will switch to ZRET when the axis stops after deceleration, and the control mode
will be changed from speed control mode to position control mode.
Switched From
Switched To
Operation
Speed control mode
Position control mode
VELO
VELO
Motion command
Motion command
response
EX_POSING
VELO
EX_POSING
Distribution will start
from the state Speed = 0
since the accel/decel
filter is empty.
EX_POSING
VELO
VELO
Motion command
Motion command
response
EX_POSING
VELO
EX_POSING
EX_POSING
The speed will smoothly change.
The speed at the time the motion
command is switched will increase/
decrease until it reaches the EX_POSING
target speed.
Speed control mode Position control mode
VELO
VELO
ZRET
VELO
ZRET
Speed control mode
Position control mode
ZRET
Motion command
Motion command
response