Yaskawa JAPMC-MC2300 User Manual
Page 84
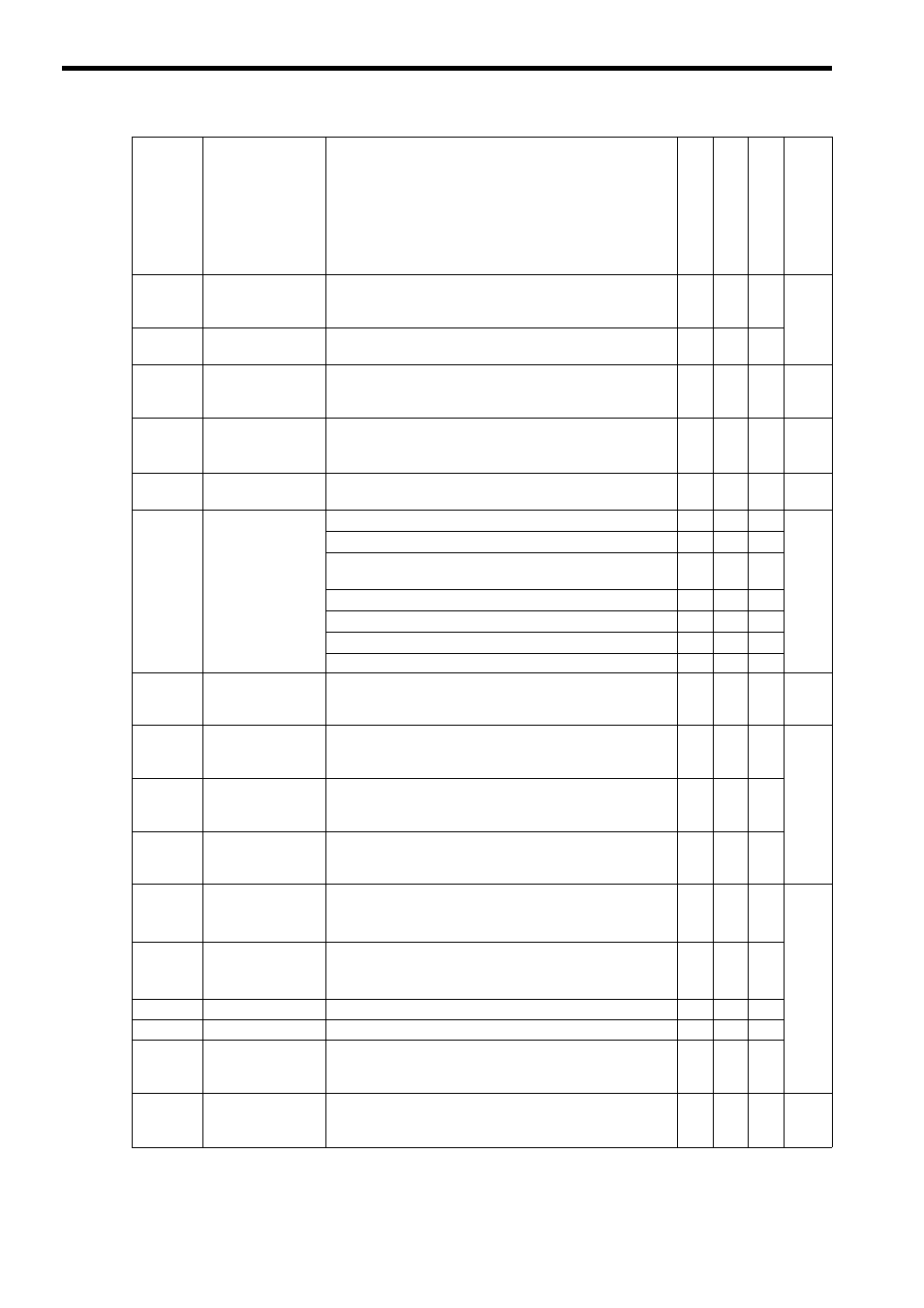
5.3 Motion Parameter Lists
5.3.2 Setting Parameter List
5-12
OL
48
Zero Point Position
in Machine Coordi-
nate System Offset
1 = 1 reference unit
P.5-40
OL
4A
Work Coordinate
System Offset
1 = 1 reference unit
OL
4C
Number of
POSMAX Turns
Presetting Data
1 = 1 turn
Invalid for linear type
P.5-40
OW
4E
to
OW
5B
-
Reserved for system use
-
-
-
-
OW
5C
Fixed Parameter
Number
Set the number of the fixed parameter to read with the
FIXPRM_RD motion subcommand.
P.5-41
OW
5D
General-purpose
DO
Bit 0: General-purpose DO_0 (0: OFF/1: ON)
P.5-41
Bit 1: General-purpose DO_1 (0: OFF/1: ON)
Bit 2: General-purpose DO_2 (0: OFF/1: ON)
In normal operation mode, a specific condition is required.
Bit 3: General-purpose DO_3 (0: OFF/1: ON)
Bit 4: General-purpose DO_4 (0: OFF/1: ON)
Bit 5: General-purpose DO_5 (0: OFF/1: ON)
Bits 6 to F: Reserved for system use
-
-
-
OL
5E
Encoder Position
when Power is OFF
(Lower 2 words)
1 = 1 pulse
For linear type, do not set this register.
P.5-42
OL
60
Encoder Position
when Power is OFF
(Upper 2 words)
1 = 1 pulse
For linear type, do not set this register.
P.5-42
OL
62
Pulse Position
when Power is OFF
(Lower 2 words)
1 = 1 pulse
For linear type, do not set this register.
OL
64
Pulse Position
when Power is OFF
(Upper 2 words)
1 = 1 pulse
For linear type, do not set this register.
OL
66
Monitor Data Com-
mand
Reserved for system use
-
-
-
P.5-42
OL
68 Writing Data Type
Reserved for system use
-
-
-
OL
6A Monitor Address
Reserved for system use
-
-
-
OL
6C Writing Data
Reserved for system use
-
-
-
OL
6E
System
Reservation
(Stop Distance)
Used in combination with MPOS as the software limit detection
condition.
OL
70
to
OL
7F
-
Reserved for system use
-
-
-
-
Register
No.
Name
Description
Normal
O
perat
ion
Mo
de
Si
mulat
ion Mod
e
G
enera
l-pu
rpose I/
O Mod
e
Refer-
ence
Page