2 reading absolute data after power is turned on, 3 reading absolute data online – Yaskawa JAPMC-MC2300 User Manual
Page 316
11.4 Other Utility Functions
11.4.2 Reading Absolute Data After Power is Turned ON
11-16
11.4.2 Reading Absolute Data After Power is Turned ON
When using an absolute encoder, the absolute data can be read out from the absolute encoder when the power supply is
turned ON and when saving the fixed parameters. The processing required to read out the data, will be repeated a max-
imum of two times, including one retry.
The time required to complete this processing two times is approximately 3 seconds for one axis and 6 seconds for two
axes, because it takes approximately 1.5 seconds to read out the data one time.
Read Absolute Data Function is Disabled
This function can be disabled by setting the Absolute Position Data Read-out at Power ON bit (fixed parameter No. 1,
bit 7) to 1 (Not execute). If so, the ABS Total Rev. Receive Error bit (monitoring parameter IL
04, bit 15) will be
ON, and an alarm will occur.
If an alarm occurs, clear the alarm, and then change the setting of the Absolute Position Reading Demand bit (setting
parameter OW
00, bit 5) from 0 (OFF) to 1 (ON) to read out the absolute data (refer to 11.4.3 Reading Absolute
Data Online on page 11-16 for details on Absolute Position Reading Demand.)
If an alarm code in stead of the absolute data is received from the absolute data, the alarm code will be reported in
the monitoring parameter
IW
2D (Servo Driver Alarm Code).
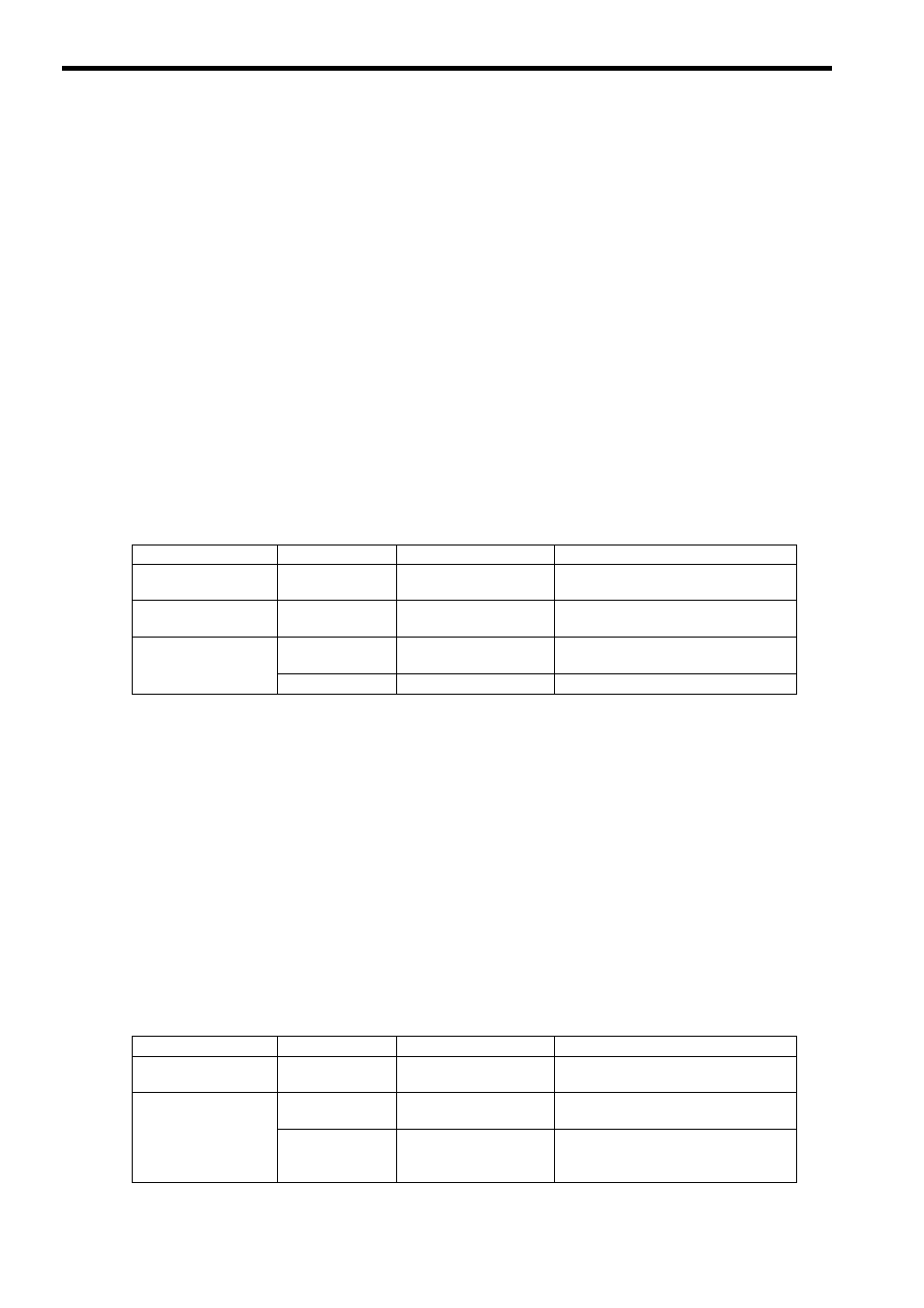
Related Parameters
The following table lists the related parameters.
11.4.3 Reading Absolute Data Online
The ladder program can start reading out the absolute data by setting the Absolute Position Reading Demand bit (set-
ting parameter OW
00, bit 5) to 1 (ON). The processing required to read out the data will be repeated a maximum
of two times, including one retry. After this process has been completed, the Absolute Position Read-out Completed bit
(monitoring parameter IW
0C, bit 7) will be ON.
If the SVA-01 Module failed to read the absolute data, the ABS Total Rev. Receive Error bit (monitoring parameter
IL
04, bit 15) will be ON.
Absolute data can be read out for only one axis at a time.
Absolute data cannot be read out in the following conditions. If executed, the ABS Total Rev. Receive Error will
occur.
• While the servo is ON
• While the parameters from MPE720 are being saved
Related Parameters
The following table lists the related parameters.
Parameter Type
Parameter No.
Parameter Name
Description
Fixed parameter
No.1, bit7
Absolute Position Data
Read-out at Power ON
0: Execute (default)
1: Not execute
Setting parameter
OW
00, bit 5
Absolute Position Reading
Demand
Executed at rising edge (OFF
→ ON).
Monitoring parameter
IL
04, bit 15
ABS Total Rev. Receive
Error
0: No alarm
1: Alarm occurrence
IW
2D
Servo Driver Alarm Code
Parameter Type
Parameter No.
Parameter Name
Description
Setting parameter
OW
00, bit 5
Absolute Position Reading
Demand
Executed at rising edge (OFF
→ ON)
Monitoring parameter
IL
04, bit 15
ABS Total Rev. Receive
Error
0: No alarm
1: Alarm occurrence
IW
0C, bit 7
Absolute Position Read-out
Completed
This bit turns OFF after the absolute data
has been read out
(OW
00, bit 5 = OFF).