Yaskawa JAPMC-MC2300 User Manual
Page 118
5.4 MP2000 Series Machine Controller Parameter Details
5.4.3 Motion Monitoring Parameter Details
5-46
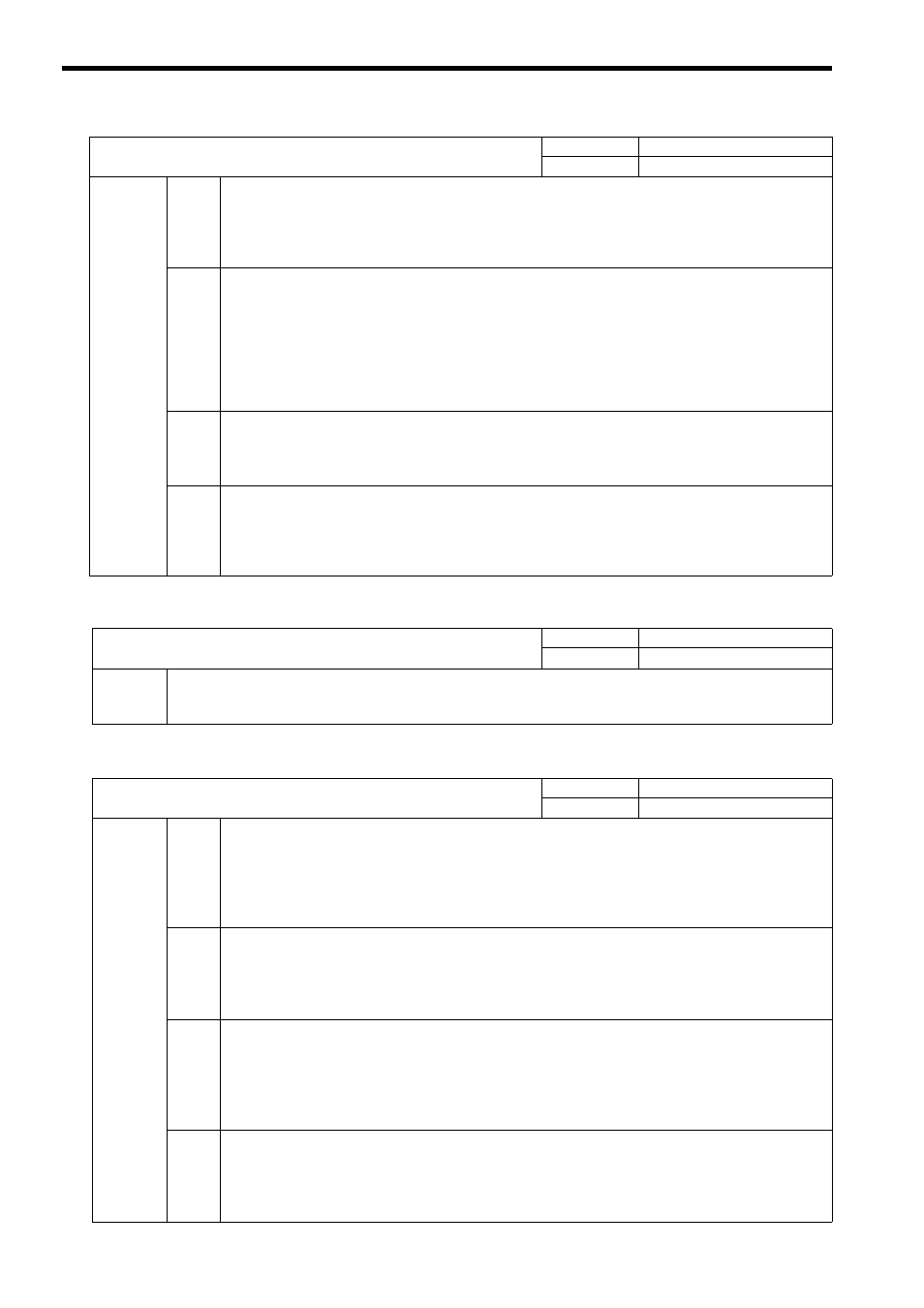
( 5 ) Motion Command Response Codes
( 6 ) Motion Command Status
Description
Bit D
Zero Point Unsetting
0: Zero point set
1: Zero point not set error
This bit turns ON if a move command (except for JOG or STEP) is performed when an infinite length axis is set
and the zero point has not been set.
Bit 13
Excessive ABS Encoder Rotations
0: In count range
1: Outside count range
This bit turns ON if the number of turns from the absolute encoder exceeds the range that the SVA can handle.
This bit is valid when using an absolute encoder and a finite-length axis.
This bit also turns ON if the result of the operation converting the current position to reference units when the
power is turned ON exceeds 32 bits.
This bit is invalid for linear type.
Bit 14
PG Disconnection Error
0: Connected (OFF)
1: Disconnected (ON)
This bit turns ON when the PG disconnection is detected.
Bit 15
ABS Total Rev. Receive Error
0: Matched (OFF)
1: Unmatched (ON)
This bit turns ON when the bit 7 of fixed parameter No. 1 (Absolute Position Data Read-out at Power ON) is set
to 1 (Not execute).
IW
08
Motion Command Response Code
Range
Unit
0 to 65535
−
Description
Stores the motion command code for the command that is currently being executed.
This is the motion command code that is currently being executed and is the same as the Motion Command (setting
parameter OW
08).
IW
09
Motion Command Status
Range
Unit
−
−
Description
Bit 0
Command Execution Flag (BUSY)
0: READY (completed)
1: BUSY (processing)
This bit indicates the motion command status. This bit turns ON during execution of commands that have been
completed or during abort processing.
Refer to Chapter 7 Motion Commands for details on command timing charts.
Bit 1
Command Hold Completed (HOLDL)
0: Command hold processing not completed
1: Command hold completed
This bit turns ON when command hold processing has been completed.
Refer to Chapter 7 Motion Commands for details on command timing charts.
Bit 3
Command Error Completed Status (FAIL)
0: Normal completion
1: Abnormal completion
This bit turns ON if motion command processing does not complete normally.
If motion command execution ends in an error, the axis will stop any motion.
Refer to Chapter 7 Motion Commands for details on command timing charts.
Bit 8
Command Execution Completed (COMPLETE)
0: Normal execution not completed
1: Normal execution completed
This bit turns ON when motion command processing was completed normally.
Refer to Chapter 7 Motion Commands for details on command timing charts.
IL
04
Alarm (cont’d)
Range
Unit
−
−