11 phase references (phase), 1 ) executing/operating procedure, 2 ) holding and aborting – Yaskawa JAPMC-MC2300 User Manual
Page 221
7.2 Motion Command Details
7.2.11 Phase References (PHASE)
7-81
7
Motion Commands
7.2.11 Phase References (PHASE)
The PHASE command is used for the synchronized operation of multiple axes under phase control mode, using the
specified speed, phase bias, and speed compensation value.
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
2.
Set the following motion setting parameters.
Speed Reference Setting: OL10
Phase Correction Setting: OL28
Speed Compensation: OW31
3.
Set OW08 to 25 to execute the PHASE motion command.
Synchronized operation using phase control will start.
IW08 will be 25 during the execution.
4.
Execute another motion command to cancel the phase control mode.
( 2 ) Holding and Aborting
The Holds A Command bit (OW09, bit 0) and the Interrupt A Command bit (OW09, bit 1) cannot be used.
When the motion command is changed from PHASE to NOP during execution of PHASE command, the axis will
decelerate to a stop in the speed control mode. Once the axis stops, the control mode will change from the speed control
mode to the position control mode.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
IL04 is 0.
2
The Servo ON condition.
IW00, bit 1 is ON.
3
Motion command execution has been completed.
IW08 is 0 and IW09, bit 0 is OFF.
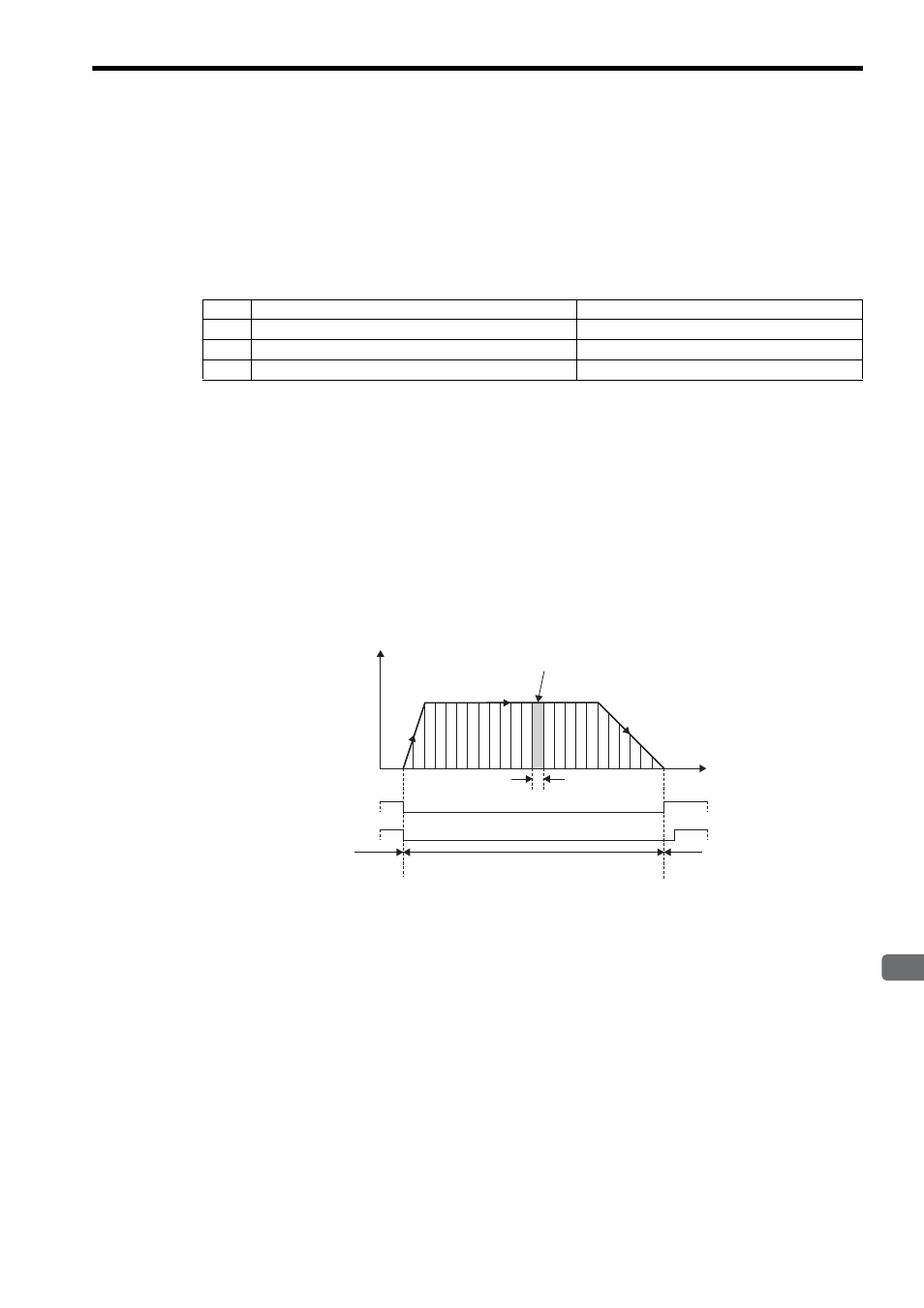
Speed
High-speed scan
Time
Discharging Completed
(IW
0C, bit 0)
Positioning Completed
(IW
0C, bit 1)
0
Moving amount per high-speed scan
(The difference between the values in OL
28
of one scan and the next scan)
Position control mode
Phase control mode
Position control
mode
PHASE Operation Pattern