3 simulation mode, 2 position and speed in simulation mode, 3 torque in simulation mode – Yaskawa JAPMC-MC2300 User Manual
Page 64: 4 functions that cannot be simulated, 1 ) di inputs
4.3 Simulation Mode
4.3.1 Motion Parameters That Can be Used in Simulation Mode
4-4
4.3 Simulation Mode
Set the fixed parameter No. 0 (Selection of Operation Modes) to 2 to select the simulation mode.
In simulation mode, the normal operation can be simulated.
A simulation of operation processes using the feedback position and speed of the actual operation is carried out and the
result will be written in the monitoring parameters. And, motion commands can be executed without actually connect-
ing a SERVOPACK and servomotor.
4.3.1 Motion Parameters That Can be Used in Simulation Mode
Refer to 5.3 Motion Parameter Lists on page 5-5 for information on the motion parameters that can be used in simula-
tion mode.
4.3.2 Position and Speed in Simulation Mode
Position and speed is simulated by converting the speed used immediately before D/A output into incremental pulses
and returning the incremental pulses to the feedback pulse counter.
For all motion commands other than the TRQ command, the speed reference output will be returned.
For TRQ, the speed limit output will be returned.
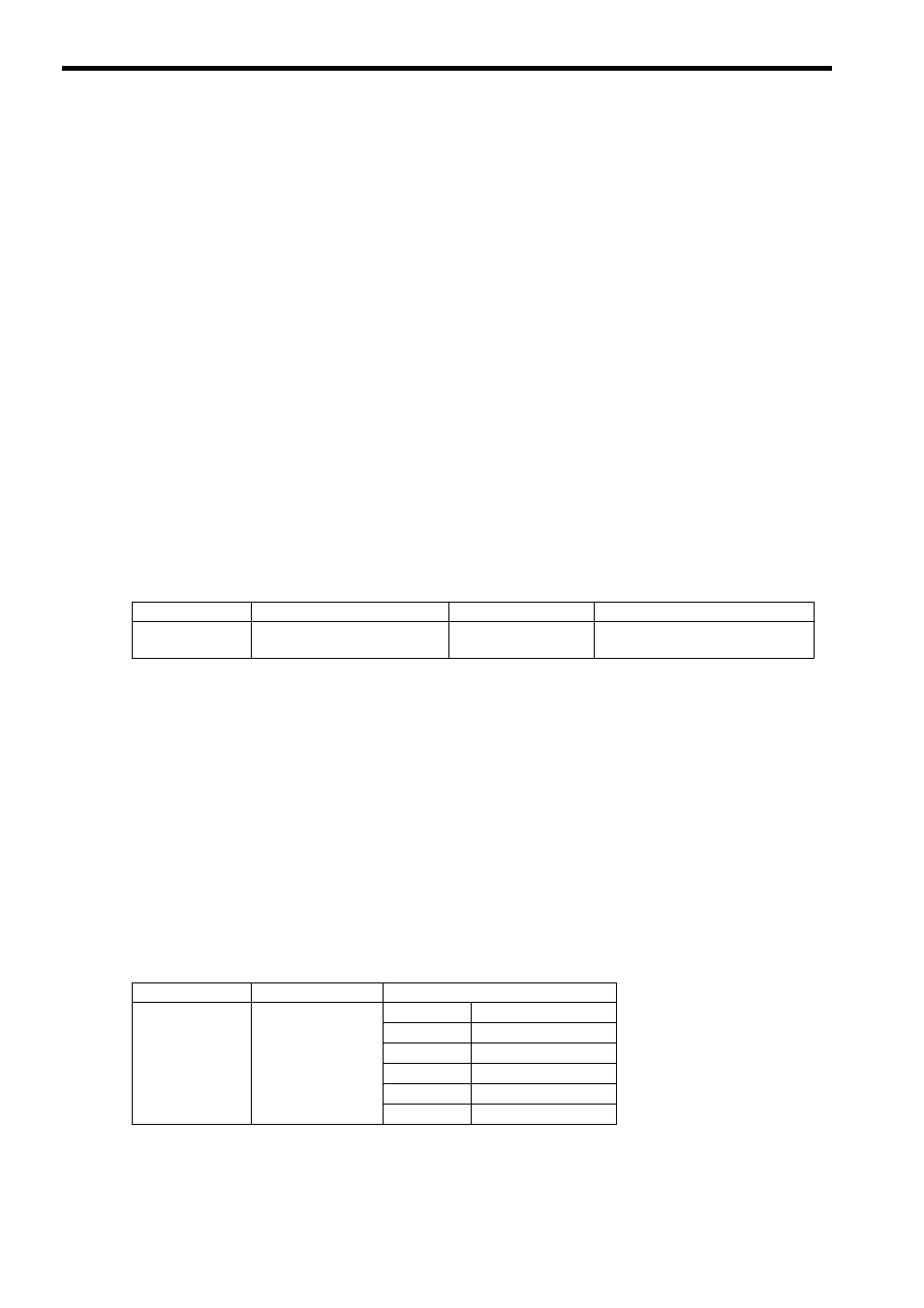
4.3.3 Torque in Simulation Mode
Torque reference are not monitored in simulation mode.
Therefore, 0 (zero) is always stored in the following monitoring parameter.
4.3.4 Functions That Cannot be Simulated
The following functions cannot be simulated.
• DI inputs
• AI inputs
• Latch detection
• Absolute Read Request
• OT processing
• PG disconnection detection
The details of the above functions in simulation mode are described below.
( 1 ) DI Inputs
All DI inputs are treated as 0 (zero). Therefore, 0 (zero) will be always stored in all bits of the following monitoring
parameter.
Register No.
Name
Unit
Remarks
IL
42
Feedback Torque/Thrust
0.01%,
0.0001%
The unit depends on the setting of
OW
03, bits C to F.
Register No.
Name
Description
IW
58
General-purpose DI
Bit 0
General-purpose DI_0
Bit 1
General-purpose DI_1
Bit 2
General-purpose DI_2
Bit 3
General-purpose DI_3
Bit 4
General-purpose DI_4
Bit 5
General-purpose DI_5