Yaskawa JAPMC-MC2300 User Manual
Page 82
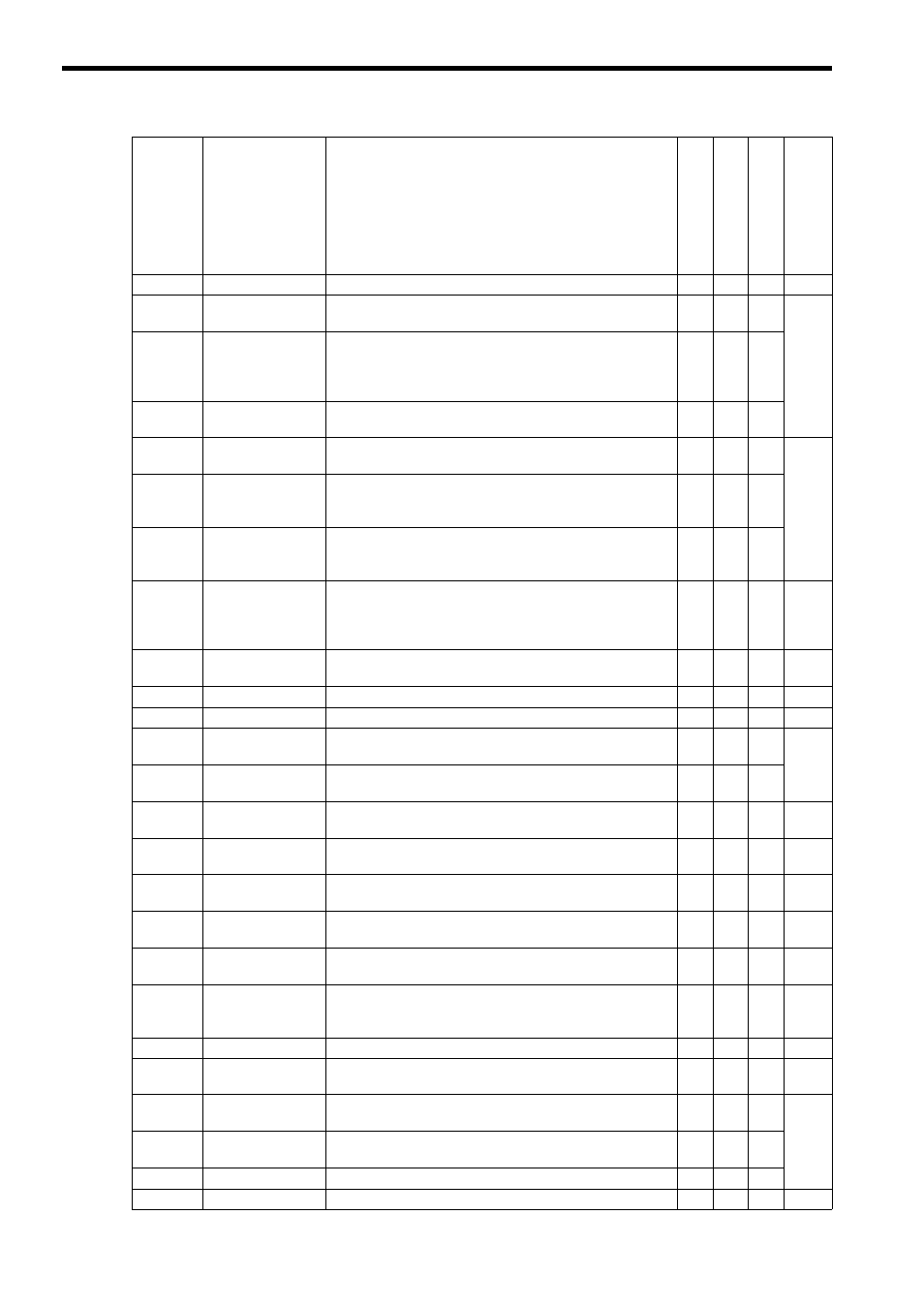
5.3 Motion Parameter Lists
5.3.2 Setting Parameter List
5-10
OW
0B -
Reserved for system use
-
-
-
-
OL
0C
Torque/Thrust
Reference Setting
Unit depends on OW
03, bits C to F (Torque Unit Selection).
P.5-31
OW
0E
Speed Limit
Setting at the
Torque/Thrust Ref-
erence
1 = 0.01% (percentage of rated speed)
OW
0F
Torque Reference
1st-order Lag Filter 1 = 1 ms
OL
10
Speed Reference
Setting
Unit depends on OW
03, bits 0 to 3 (Speed Unit Selection).
P.5-32
OW
12
Positive Side
Speed Limiter
Value
1 = 0.01% (percentage of rated speed)
OW
13
Negative Side
Speed Limiter
Value
1 = 0.01% (percentage of rated speed)
OL
14
Positive Side Limit-
ing Torque/Thrust
Setting at the
Speed Reference
Unit depends on OW
03, bits C to F (Torque Unit Selection).
P.5-32
OL
16
Secondly Speed
Compensation
Unit depends on OW
03, bits 0 to 3 (Speed Unit Selection).
P.5-32
OW
18 Override
1 = 0.01%
P.5-33
OW
19 -
Reserved for system use
-
-
-
-
OW
1A
General-purpose
AO1
1 = 0.001 V
P.5-33
OW
1B
General-purpose
AO2
1 = 0.001 V
OL
1C
Position Reference
Setting
1 = 1 reference unit
P.5-33
OL
1E
Width of Position-
ing Completed
1 = 1 reference unit
P.5-34
OL
20
NEAR Signal
Output Width
1 = 1 reference unit
P.5-34
OL
22
Error Count Alarm
Detection
1 = 1 reference unit
P.5-35
OL
24
Position Correction
Setting
1 = 1 reference unit
P.5-35
OW
26
Position
Completion Check
Time
1 = 1 ms ( No check when 0 is set)
P.5-35
OW
27 -
Reserved for system use
-
-
-
-
OL
28
Phase Correction
Setting
1 = 1 reference unit
P.5-35
OL
2A
Latch Zone Lower
Limit Setting
1 = 1 reference unit
P.5-36
OL
2C
Latch Zone Upper
Limit Setting
1 = 1 reference unit
OW
2E Position Loop Gain 1 = 0.1/s
OW
2F -
Reserved for system use
-
-
-
-
Register
No.
Name
Description
Normal
O
perat
ion
Mo
de
Si
mulat
ion Mod
e
G
enera
l-pu
rpose I/
O Mod
e
Refer-
ence
Page