Yaskawa JAPMC-MC2300 User Manual
Page 220
7.2 Motion Command Details
7.2.10 Torque Reference (TRQ)
7-80
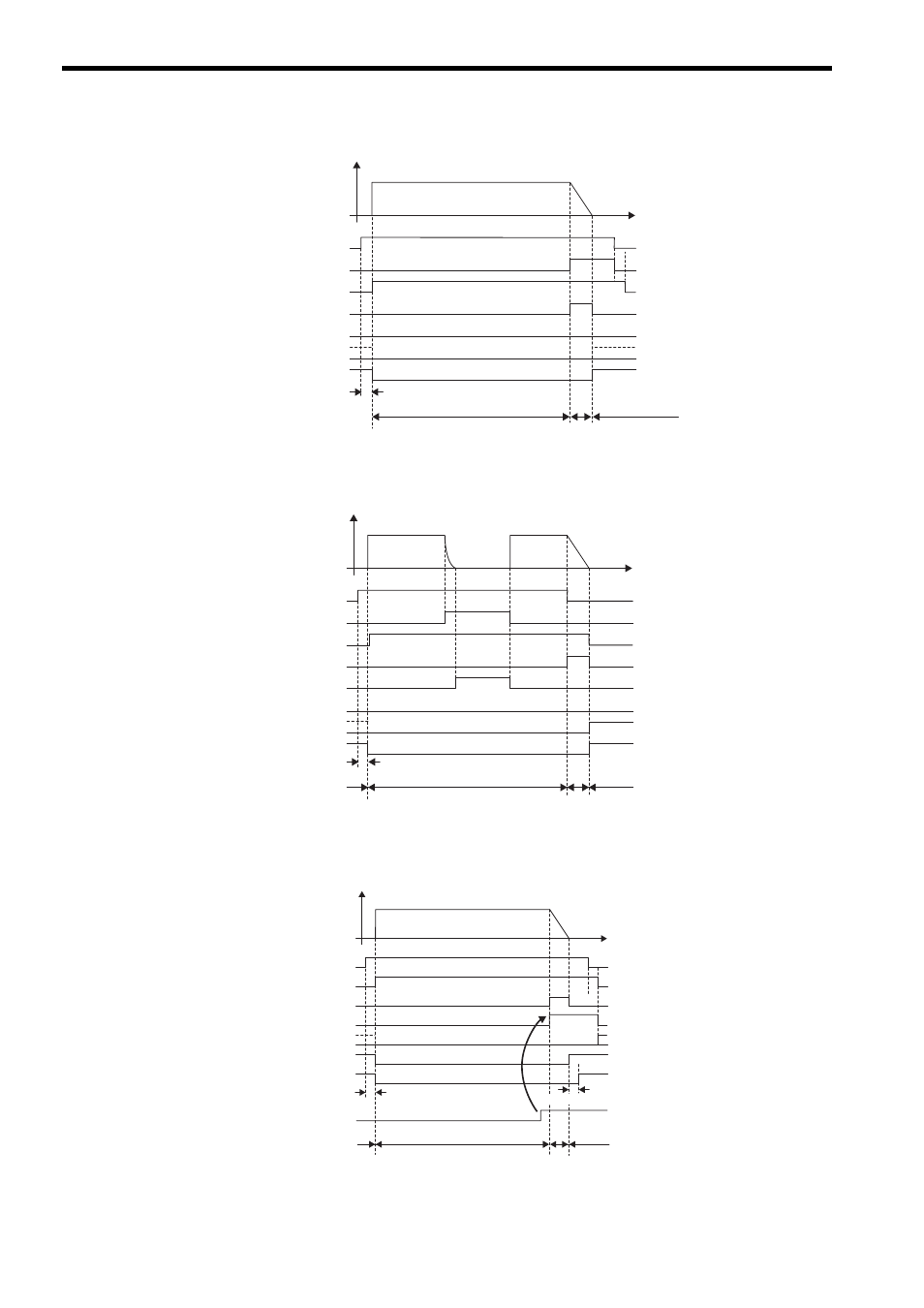
[ b ] Execution when Aborted
[ c ] Command Hold
[ d ] Execution when an Alarm Occurs
IW
0C, bit 1 (POSCOMP)
1 scan
OW
09, bit 1 (ABORT)
Torque control mode
Position control mode
Speed control
mode
OW
08 = 24 (TRQ)
IW
08 = 24 (TRQ)
IW
09, bit 0 (BUSY)
IW
09, bit 8 (COMPLETE)
IW
09, bit 3 (FAIL)
IW
0C, bit 0 (DEN)
IW
0C, bit 0 (DEN)
1 scan
OW
09, bit 0 (HOLD)
Torque control mode
Position control mode
OW
08 = 24 (TRQ)
IW
08 = 24 (TRQ)
IW
09, bit 0 (BUSY)
IW
09, bit 3 (FAIL)
IW
09, bit 1 (HOLDL)
IW
09, bit 8 (COMPLETE)
Speed control
mode
Alarm
IW
0C, bit 1 (POSCOMP)
1 scan
Torque control mode
Position control mode
Speed control
mode
Undefined length of time
OW
08 = 24 (TRQ)
IW
08 = 24 (TRQ)
IW
09, bit 0 (BUSY)
IW
09, bit 8 (COMPLETE)
IW
09, bit 3 (FAIL)
IW
0C, bit 0 (DEN)