2 setting the sva-01 module fixed parameters – Yaskawa JAPMC-MC2300 User Manual
Page 54
3.3 SVA Definition
3.3.2 Setting the SVA-01 Module Fixed Parameters
3-9
3
Setup
3.3.2 Setting the SVA-01 Module Fixed Parameters
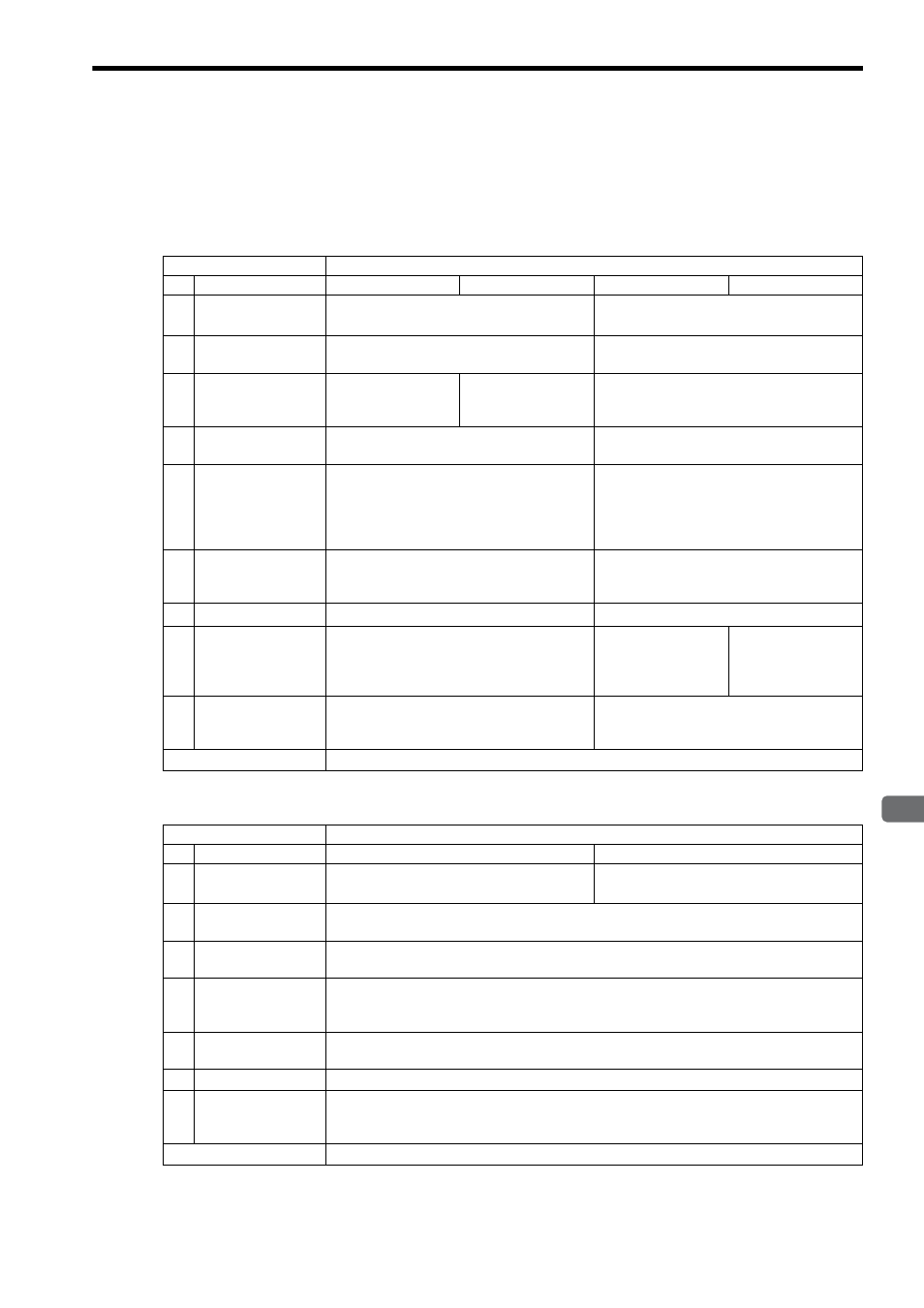
Set the SVA-01 Module fixed parameters according to the connected SERVOPACK model and parameters and the con-
nected servomotor type as shown in the table below.
With a Rotary Servomotor Connected
With a Linear Servomotor Connected
* 1. When converting the unit from
μm to UNIT, multiply by 10
n
and set the results in fixed parameter No.6 so that frac-
tions do not result.
* 2. Multiply the calculated value by 10
n
(n = n in *1 above) and set the results in fixed parameter No.36 so that frac-
tions do not result.
SVA-01 Fixed Parameter
Settings by Connected SERVOPACK Model
No.
Name
SGDA
SGDB
SGDM, SGDH
SGDS, SGDV
23
D/A Output Voltage
at 100% Speed
Rated speed (min
−1
)
÷
Cn-03 (Speed Reference
Gain)
× 1000
Pn300 (Speed Reference Input Gain)
× 0.01 ×
1000
24
D/A Output Voltage
at 100% Torque Limit Cn-13 (Torque Reference Gain) × 0.01 × 1000
Pn400 (Torque Reference Input Gain)
× 0.01 ×
1000
26
A/D Input Voltage at
100% Torque
Monitor
Any
2000 (fixed)
1000 (fixed)
28
Servo Driver Type
Selection
0 (
Σ-I)
1 (
Σ-II/Σ-III/Σ-V)
30 Encoder Selection
0 when Cn-01, bit F = 0 (Incremental encoder)
1 or 2 when Cn-01, bit F = 1 (Absolute encoder)
0 when using an incremental encoder
1 or 2 when using an absolute encoder and
Pn002.2 = 0
0 when using an absolute encoder and Pn002.2
= 1
31
Rotation Direction
Selection with an
Absolute Encoder
0 when Cn-02, bit 0 = 0 (Forward rotation)
1 when Cn-02, bit 0 = 1 (Reverse rotation)
0 when Pn000.0 = 0 (Forward rotation)
1 when Pn000.0 = 1 (Reverse rotation)
34 Rated Motor Speed
Rated speed (min
−1
)
Rated speed (min
−1
)
36
Number of Pulses
per Motor Rotation
Number of pulses per motor rotation before
multiplication (pulse/rev)
The set value of Pn201
(PG Dividing Ratio) or
Pn212 (PG Dividing
Ratio (pulse/rev)
The set value of Pn212
(PG Dividing Ratio)
(pulse/rev)
38
Maximum Number
of Absolute Encod-
er Turns Rotation
99999 (fixed)
The set value of Pn205 (Multiturn Limit Setting)
Servo Type
Rotary Type
SVA-01 Fixed Parameter
Settings by Connected SERVOPACK Model
No.
Name
SGDM, SGDH
SGDS, SGDV
6
Linear Scale Pitch
The value converted from Pn280 (Linear Scale
Pitch) (
μm) to UNIT
*1
The value converted from Pn282 (Linear Scale
Pitch (0.01
μm) to UNIT
*1
23
D/A Output Voltage
at 100% Speed
Pn300 (Speed Reference Input Gain)
× 0.01 × 1000
24
D/A Output Voltage
at 100% Torque Limit Pn400 (Force Reference Input Gain) × 0.01 × 1000
26
A/D Input Voltage at
100% Torque Moni-
tor
1000 (fixed)
28
Servo Driver Type
Selection
1 (
Σ-II/Σ-III/Σ-V)
34 Rated Speed
Rated speed in units of 0.1 m/s
36
Number of Pulses
per Linear Scale
Pitch
Pn281 (PG Dividing Ratio)
÷ 4 (pulse/scale pitch)
*2
Servo Type
Linear Type