7 step operation (step), 1 ) executing/operating procedure, 2 ) holding – Yaskawa JAPMC-MC2300 User Manual
Page 207
7.2 Motion Command Details
7.2.7 STEP Operation (STEP)
7-67
7
Motion Commands
7.2.7 STEP Operation (STEP)
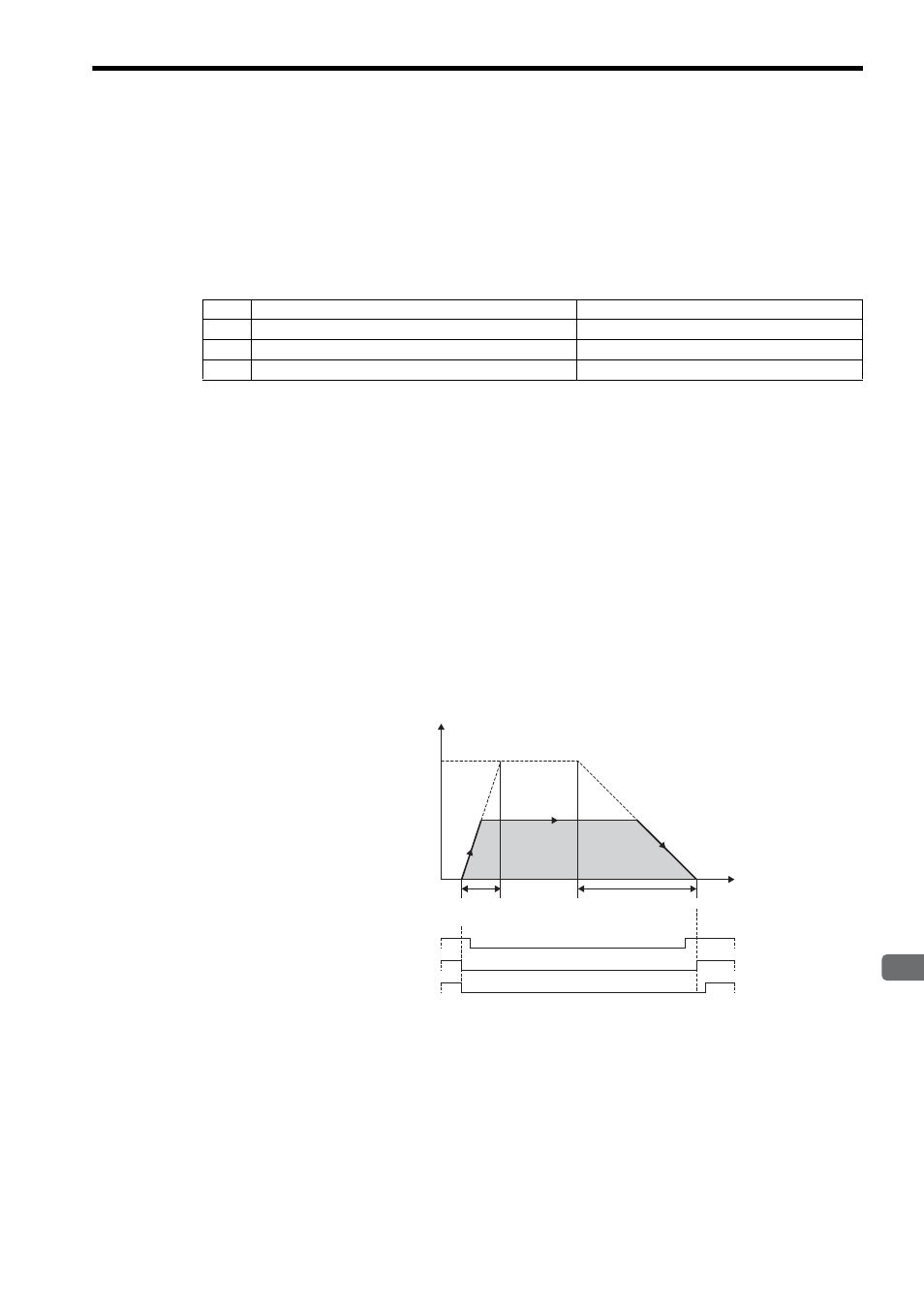
The STEP command executes a positioning for the specified travel direction, moving amount, and travel speed.
Parameters related to acceleration and deceleration are set in advance.
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
2.
Set the following motion setting parameters.
STEP Travel Distance: OL
44
Moving Direction: OW
09, bit 2
Speed Reference Setting: OL
10
Filter Type Selection: OW
03, bits 8 to B
The speed reference bit OL
10 can be changed during operation.
An override of between 0% to 327.67% can be set for the travel speed.
3.
Set OW
08 to 8 to execute the STEP motion command.
STEP operation will start. IW
08 will be 8 during execution.
IW
0C, bit 3 will turn ON when the axis reaches the target position.
IW
0C, bit 1 will turn ON when the axis reaches the target position and the positioning has been completed.
4.
Set OW
08 to 0 to execute the NOP motion command and then complete the STEP operation.
( 2 ) Holding
Axis travel can be stopped during command execution and then the remaining travel can be restarted. A command is
held by setting the Holds A Command (OW
09, bit 0) to 1.
• Set the Holds A Command bit (OW
09, bit 0) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the Command Hold Completed bit (IW
09, bit 1) will turn ON.
• Reset the Holds A Command bit (OW
09, bit 0) to 0.
The command hold status will be cleared and the remaining portion of the positioning will be restarted.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
IL
04 is 0.
2
The Servo ON condition.
IW
00, bit 1 is ON.
3
Motion command execution has been completed.
IW
08 is 0 and IW
09, bit 0 is OFF.
Speed
Rated speed
Speed Reference
Setting
(OL
10)
Straight Line Acceleration/
Acceleration Time Constant
(OL
36)
Straight Line Deceleration/
Deceleration Time Constant
(OL
38)
Time
NEAR Position
(IW
0C, bit 3)
Discharging Completed
(IW
0C, bit 0)
100(%)
0
STEP Travel
Distance
(OL
44)
Positioning Completed
(IW
0C, bit 1)
STEP Operation Pattern