1 sva-01 module control block diagram – Yaskawa JAPMC-MC2300 User Manual
Page 270
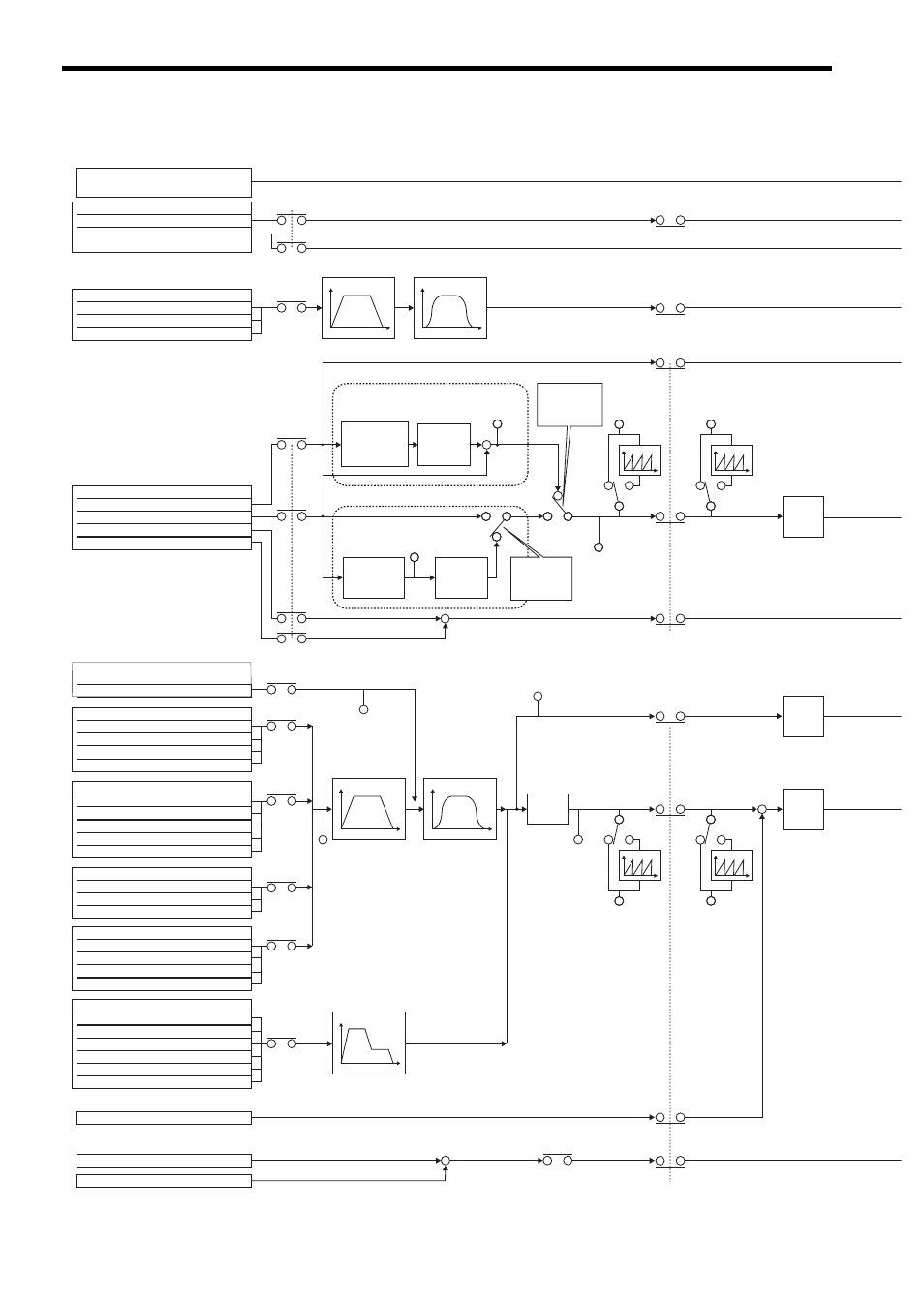
9.1 SVA-01 Module Control Block Diagram
9-2
9.1 SVA-01 Module Control Block Diagram
TRQ
VELO
PHASE
INTERPOLATE
/LATCH
POSING
EX_POSING
FEED
STEP
ZRET
Asymmetrical Trapezoidal
Acceleration/Deceleration
Acceleration/
Deceleration
Filter
Machine lock status
(IW
0C, bit 6)
Machine lock status
(IW
0C, bit 6)
Machine lock status
(IW
0C, bit 6)
Machine lock status
(IW
0C, bit 6)
Phase Reference Generation
(when using an electronic shaft)
Phase Reference Generation
(when using an electronic cam)
Target Position
Difference Monitor
IL
1C
Calculates the
amount of
change in
position relative to
the speed
reference.
Reference
position
calculation
(Integration)
+
+
CPOS
IL
10
MPOS
IL
12
Finite
length
Infinite
length
Finite
length
Infinite
length
CPOS
IL
10
MPOS
IL
12
Finite
length
Infinite
length
Finite
length
Infinite
length
Unit
conversion
[UNIT]
↓
[pulse]
DPOS
IL
14
OFF
ON
ON
OFF
Target Position
Difference Monitor
IL
1C
Calculates
increment value
from previous
scan.
Reference
position
calculation
(Integration)
+
Phase
Compensation
Type
(OW
09, bit 6)
+
Asymmetric Trapezoidal
Acceleration/Deceleration
Zero Point Return
Acceleration/
Deceleration
Filter
TPOS
(IL
0E)
Target Position
Difference Monitor
IL
1C
TPOS
(IL
0E)
Unit
conversion
[UNIT]
↓
[pulse]
Unit
conversion
[UNIT]
↓
[pulse]
DPOS
IL
14
+
Reference
position
calculation
Speed Compen. in Pos. Mode
(OW
01, bit 2)
+
Torque Reference (TRQ) Commands
OL
0C: Torque/Thrust Reference Setting
OW
0E: Speed Limit Setting at the
Torque/Thrust Reference
Speed Reference (VELO) Commands
OL
10: Speed Reference Setting
OL
36: Straight Line Acceleration/Acceleration Time Constant
OL
38: Straight Line Deceleration/Deceleration Time Constant
Step Operation (STEP) Commands
OL
10: Speed Reference Setting
OL
36: Straight Line Acceleration/Acceleration Time Constant
OL
38: Straight Line Deceleration/Deceleration Time Constant
OL
44: STEP Travel Distance
External Positioning (EX_POSING) Commands
OL
10: Speed Reference Setting
OL
36: Straight Line Acceleration/Acceleration Time Constant
OL
38: Straight Line Deceleration/Deceleration Time Constant
OL
1C: Position Reference Setting
OL
46:
External Positioning Final Travel Distance
JOG Operation (FEED) Commands
OL
10: Speed Reference Setting
OL
36: Straight Line Acceleration/Acceleration Time Constant
OL
38: Straight Line Deceleration/Deceleration Time Constant
Zero Point Return (ZRET) Commands
OL
10: Speed Reference Setting
OW
3C: Zero Point Return Method
OW
3D: Width of Starting Point Position Output
OL
3E: Approach Speed
OL
40: Creep Rate
OL
42: Zero Point Return Travel Distance
Positioning (POSING) Commands
OL
10: Speed Reference Setting
OL
36: Straight Line Acceleration/Acceleration Time Constant
OL
38: Straight Line Deceleration/Deceleration Time Constant
OL
1C: Position Reference Setting
Phase Control (PHASE) Commands
OL
10: Speed Reference Setting
OL
28: Phase Correction Setting
OW
31: Speed Compensation
OL
16: Secondary Speed Compensation
OL
14: Positive Side Limiting Torque/
Thrust Setting at the Speed
Reference
Interpolation (INTERPOLATE/LATCH)
Command
OL
1C: Position Reference Setting
OL
24: Position Correction Setting
OW
31: Speed Compensation
OL
16 Secondly Speed Compensation
Phase Reference
Creation
Calculation
Disable
(OW
05, bit 1)