2 ) encoder selection and absolute encoder usage, 3 ) encoder resolution – Yaskawa JAPMC-MC2300 User Manual
Page 279
10.3 Absolute Position Detection for Finite Length Axes
10.3.2 Detailed Descriptions on Parameter Settings for Finite Length Axes
10-8
10.3.2 Detailed Descriptions on Parameter Settings for Finite Length Axes
( 1 ) Axis Selection (Machine Controller Fixed Parameter No.1, Bit 0)
This setting is used to select either an finite or infinite length axis.
Set to 0 when using the axis as a finite length axis.
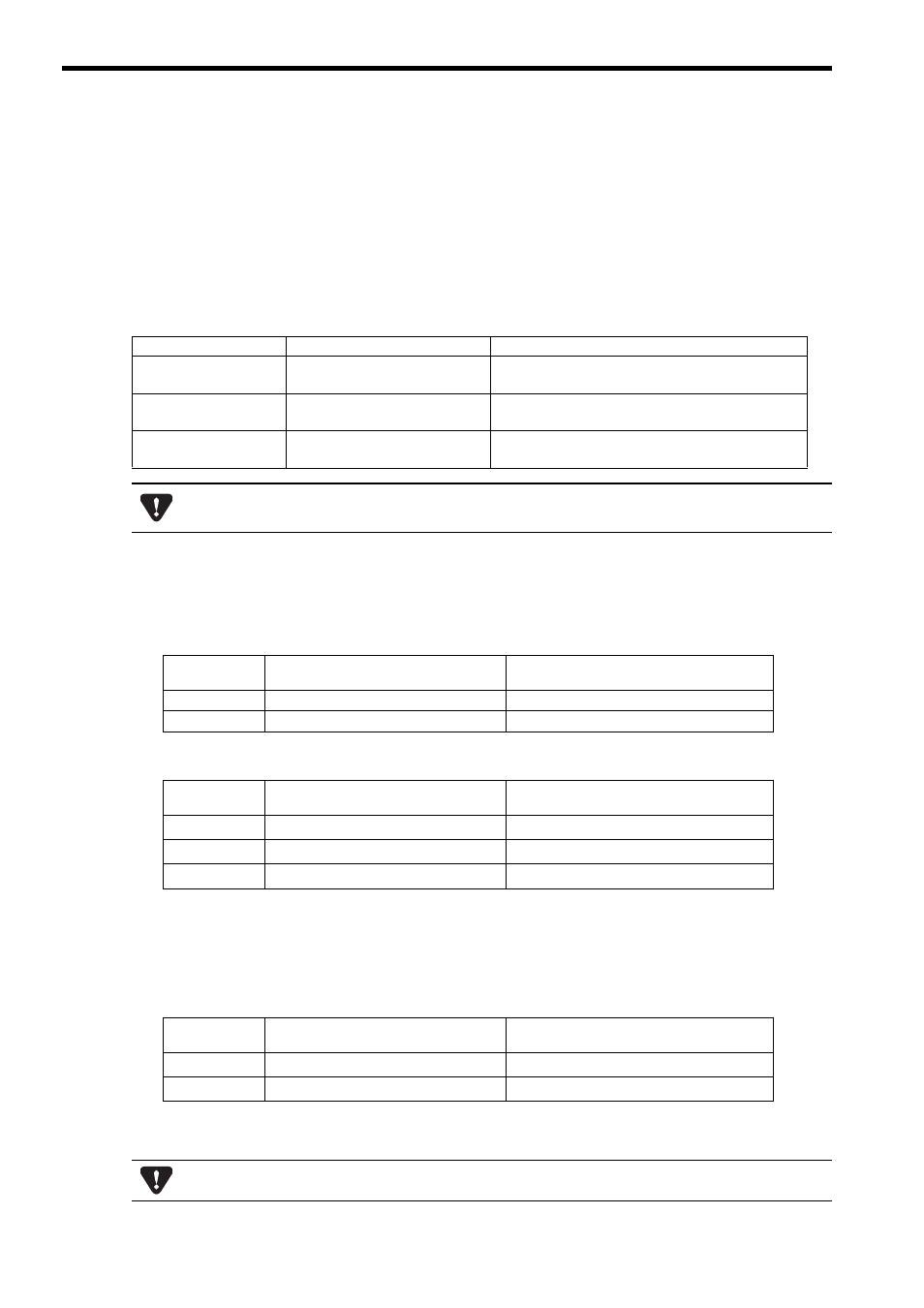
( 2 ) Encoder Selection and Absolute Encoder Usage
For an axis performing absolute position detection, set the parameters as shown in the following table.
( 3 ) Encoder Resolution
The methods to set the fixed parameter No. 36 and No. 22 differs depending on the connected SERVOPACK model.
When a
Σ-I Series SERVOPACK is Connected
When a
Σ-II Series SERVOPACK is Connected
* 1. The actual value depends on the value of Pn201 (PG Divider). The values shown here are the max. values
that can be set for each encoder.
* 2. The set value when using a 17-bit encoder is limited to 16384 max. since the max. value that can be set for
Pn201 (PG Divider) is 16384.
When a
Σ-III or Σ-V Series SERVOPACK is Connected
The actual value depends on the value of Pn212 (PG Dividing Pulse). The values shown here are the max. val-
ues that can be set.
Model
Parameter
Setting
SVA-01 Module
Fixed parameter 30
(Encoder Selection)
1: Absolute encoder
Σ-II/Σ-III/Σ-V Series
Parameter: Pn002.2
(Absolute Encoder Usage)
0: Uses absolute encoder as an absolute encoder.
Σ-I Series
Parameter: Cn-0001 Bit E
(Encoder Selection)
1: Absolute encoder
If the above settings are not used, correct motion control will not be performed. Set the parameters carefully.
Be sure to set both the SVA-01 Module and SERVOPACK parameters.
Number of Bits
Fixed Parameter No. 36
Number of Pulses per Motor Rotation
Fixed Parameter No. 22
Pulse Counting Mode Selection
12
1024
6: Pulse A/B mode (Input pulse multiplier: 4)
15
8192
6: Pulse A/B mode (Input pulse multiplier: 4)
Number of Bits
Fixed Parameter No. 36
Number of Pulses per Motor Rotation
Fixed Parameter No. 22
Pulse Counting Mode Selection
13
2048
∗1
6: Pulse A/B mode (Input pulse multiplier: 4)
16
16384
∗1
6: Pulse A/B mode (Input pulse multiplier: 4)
17
16384
∗1, ∗2
6: Pulse A/B mode (Input pulse multiplier: 4)
Number of Bits
Fixed Parameter No. 36
Number of Pulses per Motor Rotation
Fixed Parameter No. 22
Pulse Counting Mode Selection
17
16384
∗
6: Pulse A/B mode (Input pulse multiplier: 4)
20
262144
∗
6: Pulse A/B mode (Input pulse multiplier: 4)
If the above settings are not used, correct motion control will not be performed. Set the parameters carefully.