7 acceleration/deceleration filter settings – Yaskawa JAPMC-MC2300 User Manual
Page 137
6.1 Example Setting of Motion Parameters for the Machine
6.1.7 Acceleration/Deceleration Filter Settings
6-13
6
Motion Parameter Setting Examples
6.1.7 Acceleration/Deceleration Filter Settings
There are two types of acceleration/deceleration filter: The exponential acceleration/deceleration filter and the
moving average filter. These filter settings can be used to set non-linear acceleration/deceleration curves.
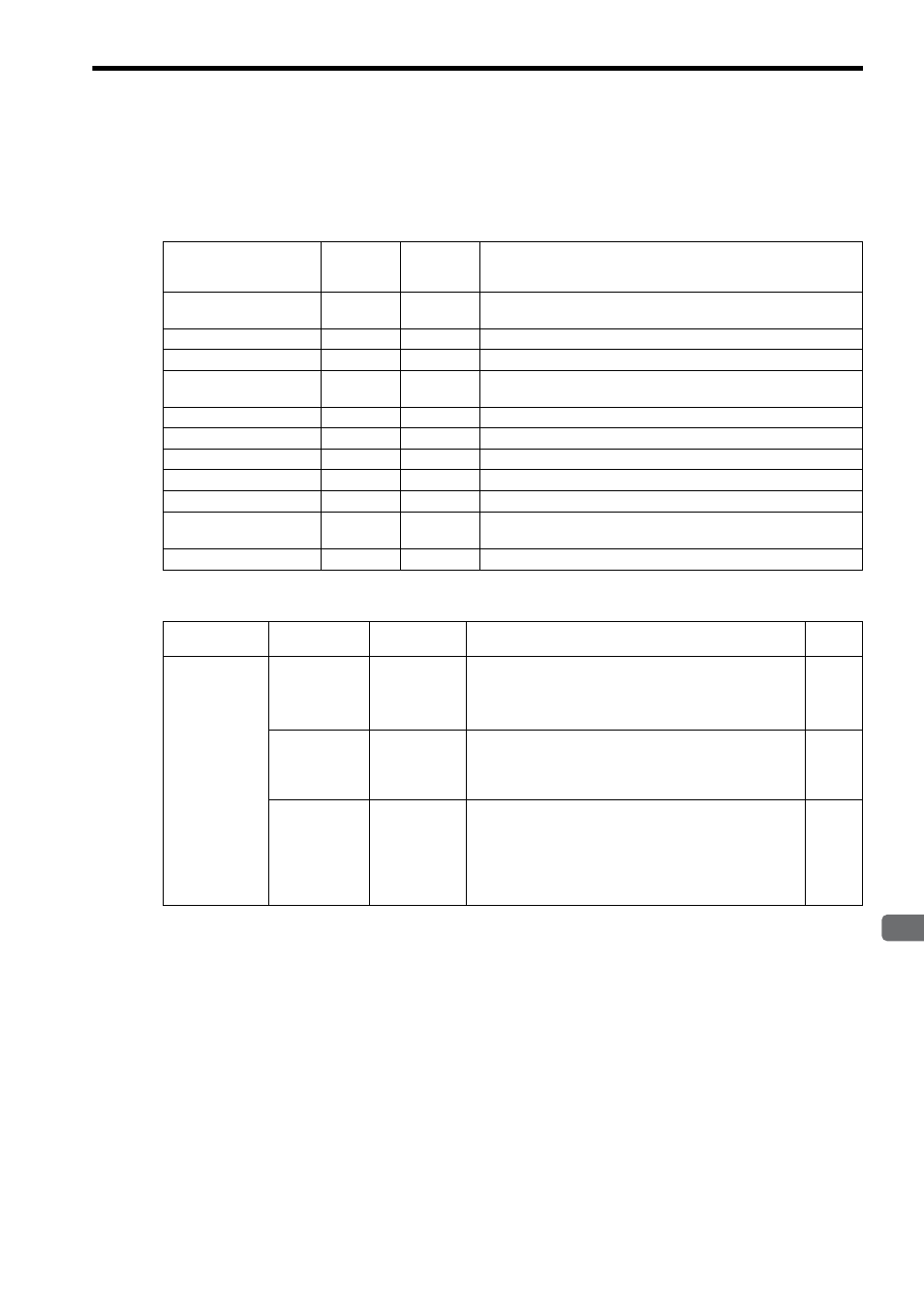
The table below shows the applicable filter for each motion command.
The parameters related to the acceleration/deceleration filter settings are listed in the following table.
Motion Command
Exponential
Accel/Decel
Filter
Moving
Average Fil-
ter
Description
POSING
Applicable
Applicable
The filter can be continuously used for a motion command other than
VELO and TRQ.
EX_POSING
Applicable
Applicable
Same as the above
ZRET
N/A
N/A
–
INTERPOLATE
Applicable
Applicable
The filter can be continuously used for a motion command other than
VELO and TRQ.
ENDOF_INTERPOLATE
Applicable
Applicable
Same as the above
LATCH
Applicable
Applicable
Same as the above
FEED
Applicable
Applicable
Same as the above
STEP
Applicable
Applicable
Same as the above
VELO
Applicable
Applicable
The filter can be continuously used for only a motion command VELO.
TRQ
Applicable
N/A
OW
0F (Torque Reference 1st-order Lag Filter) is used instead of
OW
3A (Filter Time Constant).
PHASE
N/A
N/A
–
Parameter Type
Parameter No.
(Register No.)
Name
Description
Default
Value
Motion Setting
Parameters
OW
03
Bits 8 to B
Filter Type
Selection
Set the acceleration/deceleration filter type.
0: Filter none
1: Exponential acceleration/deceleration filter
2: Moving average filter
0
OW
0F
Torque
Reference
1st-order Lag
Filter
Set the primary lag filter for the torque/thrust reference and
the torque/thrust limit.
0
OW
3A
Filter Time
Constant
Sets the acceleration/deceleration filter time constant for a
command other than Torque/Thrust Reference (TRQ)
Always make sure that pulse distribution has been
completed (i.e., that monitoring parameter
IW
0C, bit 0 is set to 1) before changing the time
constant.
0