Yaskawa JAPMC-MC2300 User Manual
Page 81
5.3 Motion Parameter Lists
5.3.2 Setting Parameter List
5-9
5
Motion Parameters
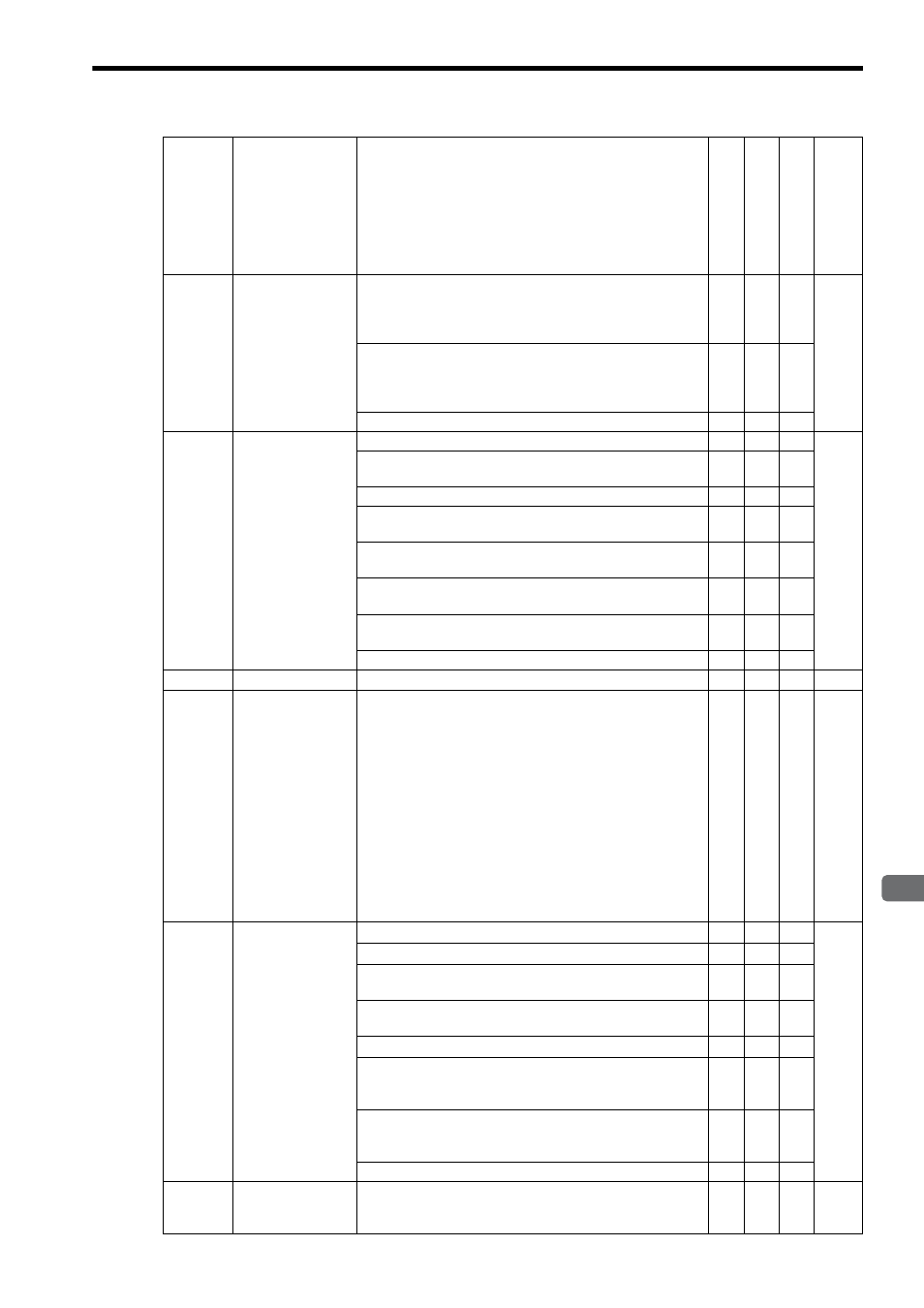
OW
04 Function Setting 2
Bits 0 to 3: Latch Detection Signal Selection
0: DI_5 (DEC/EXT)
1: DI_2 (ZERO/HOME LS)
2: Phase-C pulse input signal
P.5-28
Bits 4 to 7: External Positioning Signal Setting
0: DI_5 (DEC/EXT)
1: DI_2 (ZERO/HOME LS)
2: Phase-C pulse input signal
Bits 8 to F: Reserved for system use
-
-
-
OW
05 Function Setting 3
Bit 0: Reserved for system use
-
-
-
P.5-28
Bit 1: Phase Reference Creation Calculation Disable
(0: Enabled/1:Disabled)
Bits 2 to 7: Reserved for system use
-
-
-
Bit 8: Zero Point Return Deceleration LS Signal
(0: OFF/1: ON)
Bit 9: Zero Point Return Reverse Run Side Limit Signal
(0: OFF/1: ON)
Bit A: Zero Point Return Forward Run Side Limit Signal
(0: OFF/1:ON)
Bit B: Zero Point Return Input Signal
(0: OFF/1:ON)
Bits C to F: Reserved for system use
-
-
-
OL
06 -
Reserved for system use
-
-
-
-
OW
08 Motion Command
0: NOP (No Command)
1: POSING (Position Mode) (Positioning)
2: EX_POSING (Latch Target Positioning)
(External Positioning)
3: ZRET (Zero Point Return)
4: INTERPOLATE (Interpolation)
5: ENDOF_INTERPOLATE (For system use)
6: LATCH (Interpolation Mode with Latch Input)
7: FEED (JOG Mode)
8: STEP (Relative Position Mode) (Step Mode)
9: ZSET (Set Zero Point)
23: VELO (Speed Reference)
24: TRQ (Torque Reference)
25: PHASE (Phase Reference)
P.5-29
OW
09
Motion Command
Control Flag
Bit 0: Holds a Command (0: OFF/1: ON)
P.5-29
Bit 1: Interrupt a Command (0: OFF/1: ON)
Bit 2: Moving Direction (JOG/STEP)
(0: Forward rotation/1: Reverse rotation)
Bit 3: Zero Point Return Direction Selection
(0: Reverse rotation/1: Forward rotation)
Bit 4: Latch Zone Effective Selection (0: Disabled/1: Enabled)
Bit 5: Position Reference Type
(0: Incremental value add method/1: Absolute value set
method)
Bit 6: Phase Compensation Type
(0: Incremental value add method/1: Absolute value set
method))
Bits 7 to F: Reserved for system use
-
-
-
OW
0A
Motion Subcom-
mand
0: NOP (No Command)
1 to 4: Reserved for system use
5: FIXPRM_RD (Read Fixed Parameter)
P.5-30
Register
No.
Name
Description
Normal
O
perat
ion
Mo
de
Si
mulat
ion Mod
e
G
enera
l-pu
rpose I/
O Mod
e
Refer-
ence
Page