Yaskawa JAPMC-MC2300 User Manual
Page 122
5.4 MP2000 Series Machine Controller Parameter Details
5.4.3 Motion Monitoring Parameter Details
5-50
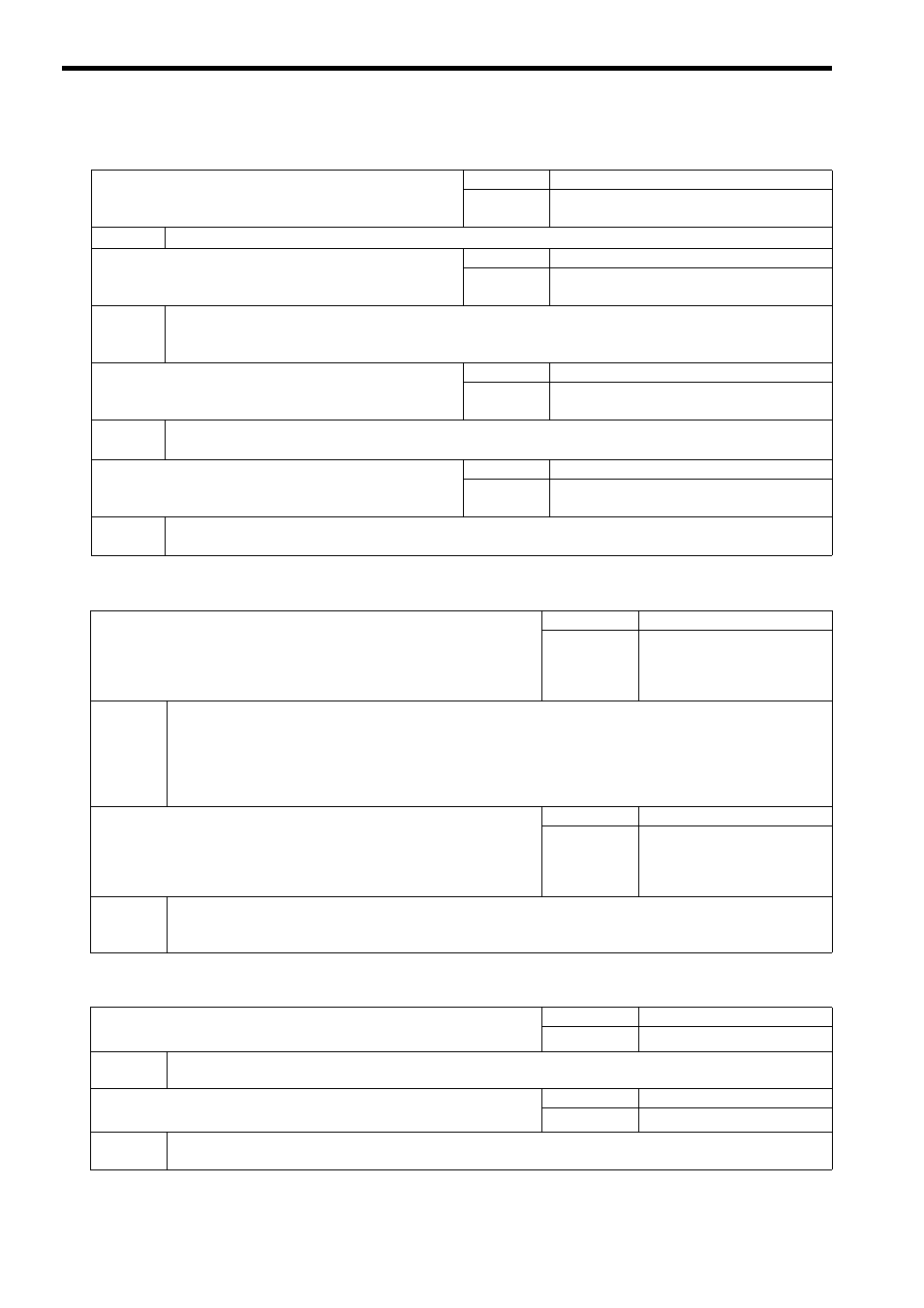
( 11 ) Speed Information
( 12 ) Servo Driver Information
( 13 ) Position Information 2
IL20
Speed Reference Output Monitor
Range
Unit
−2
31
to 2
31
−1
Depends on the speed unit set in Function Setting 1
(setting parameter OW
03, bits 0 to 3)
Description
Stores the speed reference that is being output.
IL24
Integral Output Monitor
Range
Unit
−2
31
to 2
31
−1
Depends on the speed unit set in Function Setting 1
(setting parameter OW
03, bits 0 to 3)
Description
Stores the output value of PI control operation in the control loop for position control and phase control.
This bit is valid in position control mode and phase control mode.
Refer to 9.1 SVA-01 Module Control Block Diagram
on page 9-2
for information on control loop.
IL26
Primary Lag Monitor
Range
Unit
−2
31
to 2
31
−1
Depends on the speed unit set in Function Setting 1
(setting parameter OW
03, bits 0 to 3)
Description
Stores the result of subtraction “Integral output (IL
24)
− Primary lag element output”.
This bit is valid in position control mode and phase control mode.
IL28
Position Loop Output Monitor
Range
Unit
−2
31
to 2
31
−1
Depends on the speed unit set in Function Setting 1
(setting parameter OW
03, bits 0 to 3)
Description
Stores the position loop output value (value without adding the position feedforward calculated value).
This bit is valid in position control mode and phase control mode.
IL40
Feedback Speed
Range
Unit
−2
31
to 2
31
−1
Depends on the speed unit set in
Function Setting 1
(setting parameter OW
03,
bits 0 to 3)
Description
Stores the feedback speed.
The value is determined by the Feedback Speed Movement Averaging Time Constant (fixed parameter 42) and unit set
from the difference with the Machine Coordinate System Feedback Position (monitoring parameter IL16) in each
scan.
The setting unit for this parameter depends on the Speed Unit Selection (OW03, bits 0 to 3), but
the result of applying the speed unit setting is not shown here.
IL42
Feedback Torque/Thrust
Range
Unit
−2
31
to 2
31
−1
Depends on the torque unit set in
Function Setting 1
(setting parameter OW03, bits
C to F)
Description
Stores the value of General-purpose AI Monitor 2 (IW
5A) converted in the selected torque units.
The setting unit for this parameter depends on the Torque Unit Selection (OW03, bits C to F), but
the result of applying the torque unit setting is not shown here.
IL4A
The Number of Accumulated Rotations of Absolute Value Encoder
Range
Unit
−2
31
to 2
31
−1
rev
Description
Stores the accumulated number of rotations read out from the absolute encoder when the power supply is turned
ON or when the online absolute data read function is executed.
IL4C
The Number of Initial Incremental Pulses
Range
Unit
−2
31
to 2
31
−1
pulse
Description
Stores the initial incremental pulses read out from the absolute encoder when the power supply is turned ON or
when the online absolute data read function is executed.