2 functional specifications – Yaskawa JAPMC-MC2300 User Manual
Page 24
1.2 Specifications
1.2.2 Functional Specifications
1-7
1
Overview
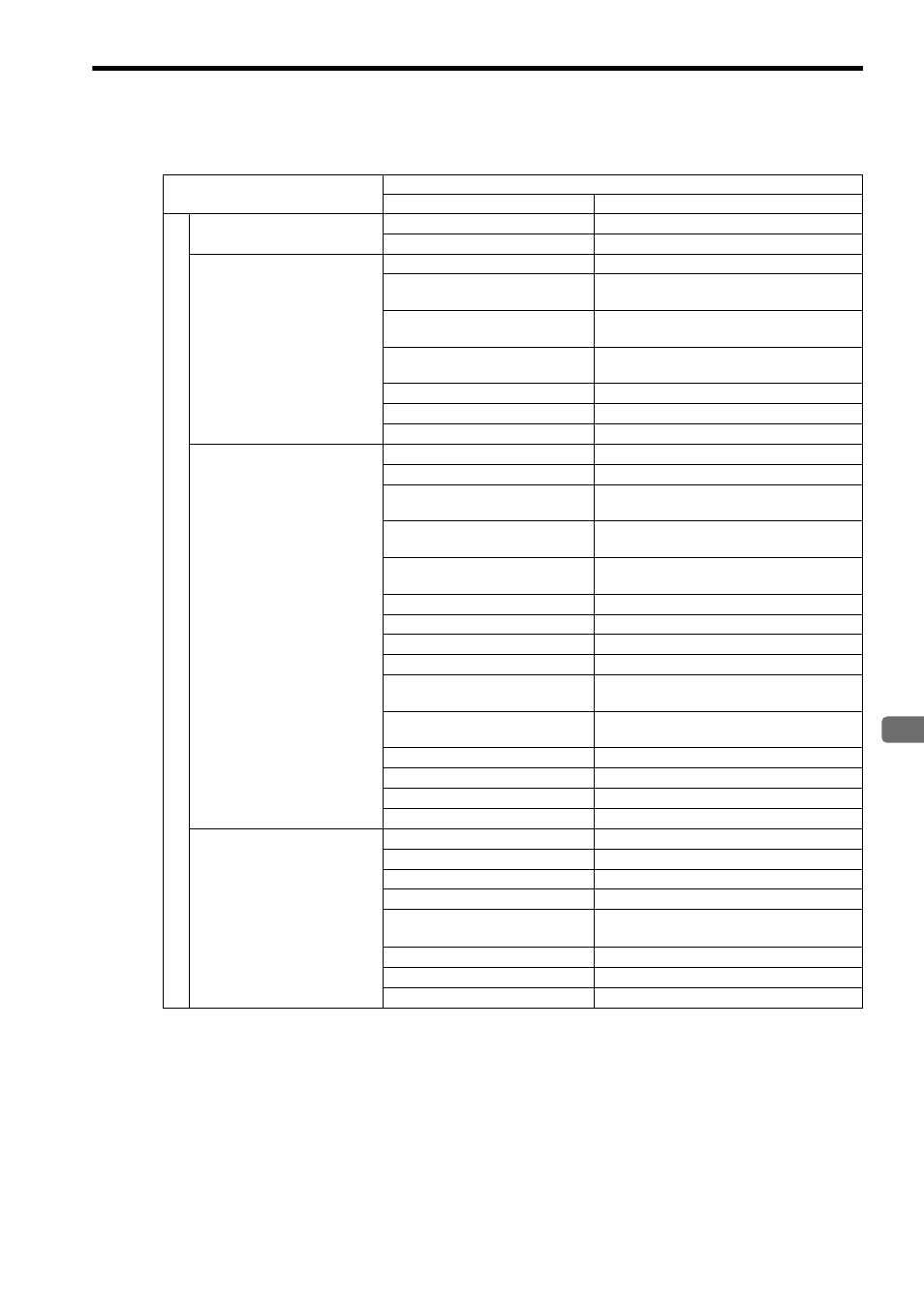
1.2.2 Functional Specifications
Item
Details
Function
Remarks
Cont
rol Fu
nct
ion
s
Torque Reference
(Open-loop)
Torque Reference
According to the torque unit selection parameter
Speed Limit at Torque Reference
Rated speed percentage designation [0.01%]
Speed Reference (Open-loop)
Speed Reference
According to the speed unit selection parameter
Acceleration
According to the acceleration/deceleration unit
selection parameter
Deceleration
According to the acceleration/deceleration unit
selection parameter
Moving Average Filter
Time Constant Setting
ms
Torque Limit
According to the torque unit selection parameter
Positive Speed Limit
Rated speed percentage designation [0.01%]
Negative Speed Limit
Rated speed percentage designation [0.01%]
Position Control
Position Reference
mm, inch, degree, pulse
Speed Reference
According to the speed unit selection parameter
Acceleration
According to the acceleration/deceleration unit
selection parameter
Deceleration
According to the acceleration/deceleration unit
selection parameter
Filter Type
Moving average or exponential acceleration/
deceleration
Filter Time Constant
ms
Position Compensation
mm, inch, degree, pulse
Speed Compensation
According to the speed unit selection parameter
Position Loop Gain
1/s
Position Loop Integration
Time Constant
ms
Speed Feed Forward Gain
Position derivative percentage designation
[0.01%]
Primary Delay Time Constant
ms
Torque Limit
Rated torque percentage designation [0.01%]
Positive Speed Limit
Rated speed percentage designation [0.01%]
Negative Speed Limit
Rated speed percentage designation [0.01%]
Phase Control
Speed Reference
According to the speed unit selection parameter
Speed Compensation
According to the speed unit selection parameter
Phase Compensation
mm, inch, degree, pulse
Phase Control Proportional Gain
Same as position loop gain parameter
Phase Control Integration
Time Constant
Same as position loop integration time constant
parameter
Torque Limit
Rated torque percentage designation [0.01%]
Positive Speed Limit
Rated speed percentage designation [0.01%]
Negative Speed Limit
Rated speed percentage designation [0.01%]