1) servo on command from the host – Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 182
8.1 Trial Operation
8-9
8
8.1.2 Trial Operation for Servomotor without Load from Host Reference
Check that the servomotor move reference or I/O signals are correctly set from the host controller to the
SERVOPACK. Also check that the wiring and polarity between the host controller and SERVOPACK, and the
SERVOPACK operation settings are correct. This is final check before connecting the servomotor to the
machine.
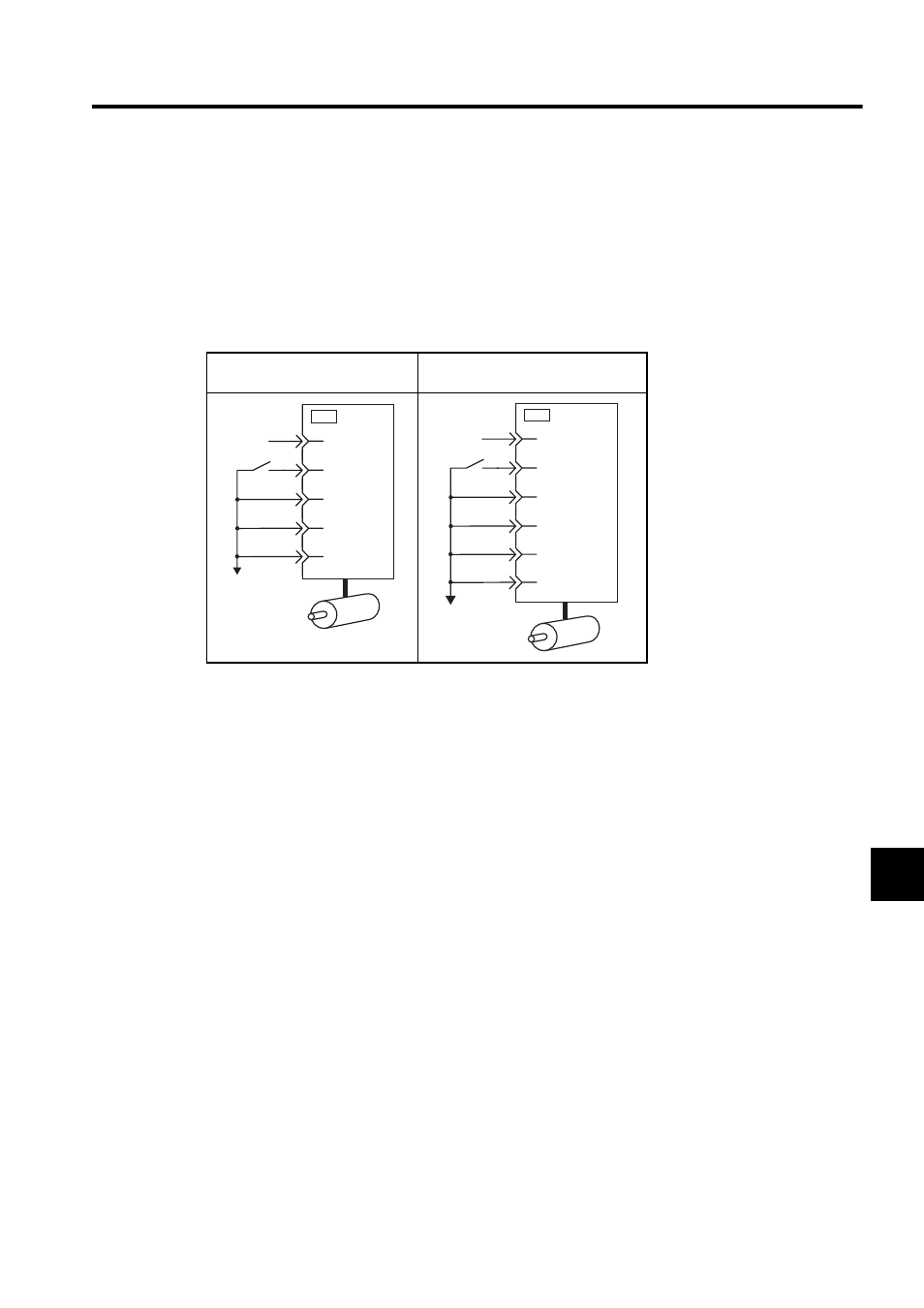
(1) Servo ON Command from the Host
The following circuits are required: External input signal circuit or equivalent.
Change the SEN signal (SGDJ-S: CN1-5, SGDJ-P:CN1-36) to the H level when an absolute
encoder is used.
SGDJ-S Speed Control
[Pn000=n.0]
SGDJ-P Position Control
[Pn000=n.1]
13
CN1
+24V
/S-ON
P-OT
N-OT
V-REF
14
16
17
3
0V
13
CN1
+24V
/S-ON
P-OT
N-OT
PULS
14
16
17
1
SIGN
3
0V