Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 187
8 Operation
8.1.2 Trial Operation for Servomotor without Load from Host Reference
8-14
10
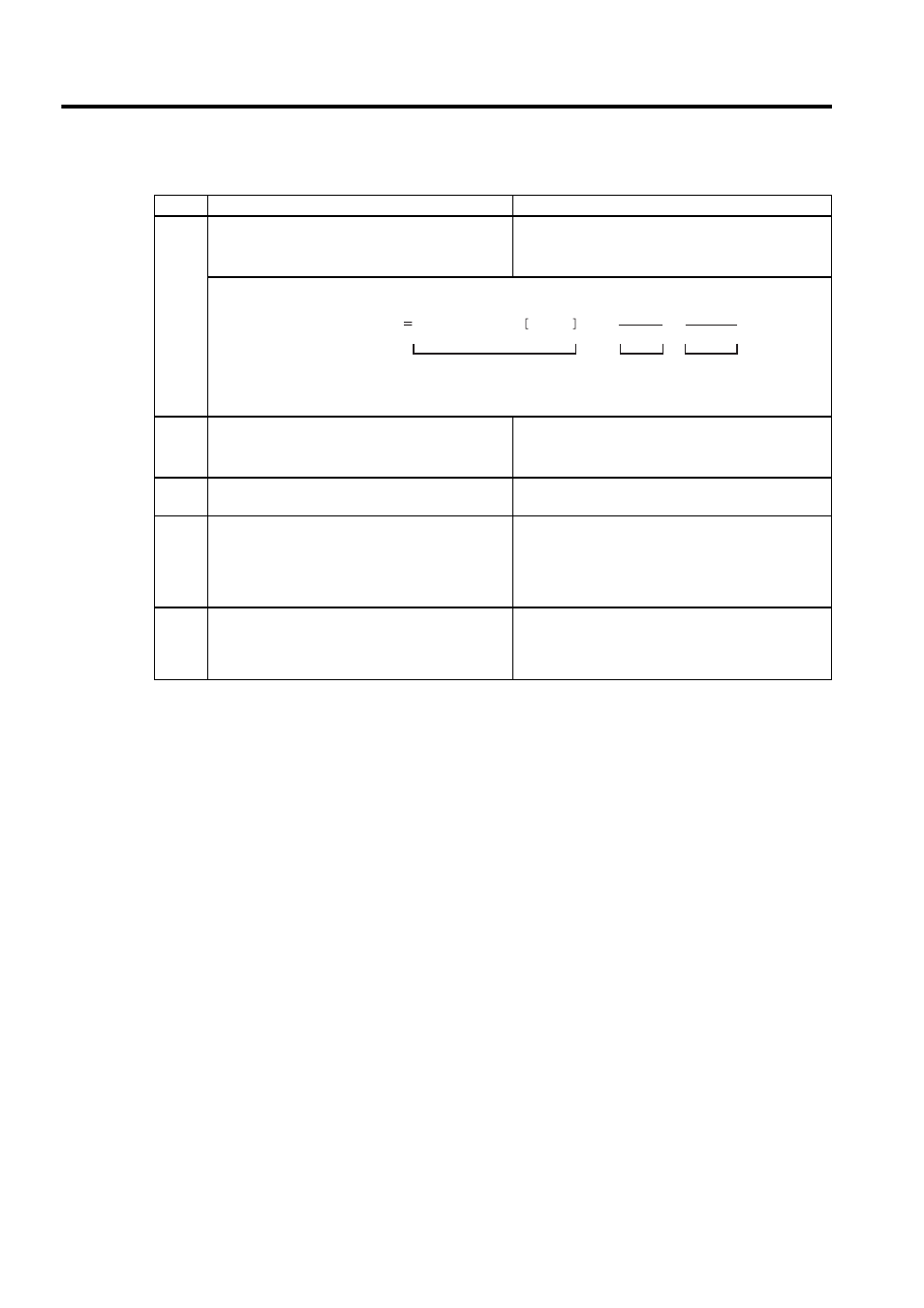
Check the reference pulse speed input to the SER-
VOPACK using the Un007 (input reference pulse
speed) [min
-1
].
Refer to 7.1.3 Basic Mode Selection and Operation for
how it is displayed.
Un007 (input reference pulse speed) [min
-1
]
The number of input reference pulses (Un00C) can be obtained from the following equation.
* The encoder pulse differs depending on the model of the servomotor used.
11
Check the motor speed using the Un000 (motor
speed) [min
-1
].
Refer to 7.1.3 Basic Mode Selection and Operation for
how it is displayed.
Un000 (motor speed) [min
-1
]
12
Check that the Un007 and Un000 values in steps 9
and 10 are equal.
−
13
Check the motor rotation direction.
To change the motor rotation direction without chang-
ing input reference pulse form, refer to 8.3.2 Switching
the Servomotor Rotation Direction.
Perform the operation from step 9 again after the
motor rotation direction is changed.
14
When the pulse reference input is stopped and servo
OFF status enters, the trial operation for servomotor
without load and using position control with the host
controller is completed.
−
(cont’d)
Step
Description
Check Method and Remarks
Un007(input reference pulse speed) input reference pulse pulses/S
× 60 ×
Pn203
Pn202
1
2 (8192)
13
×
Reference input ppm
Electronic
gear ratio
Encoder
pulse ∗