4 terms and data for servomotors with gears, 2) noise data – Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 58
3.4 Terms and Data for Servomotors With Gears
3-17
3
3.4 Terms and Data for Servomotors With Gears
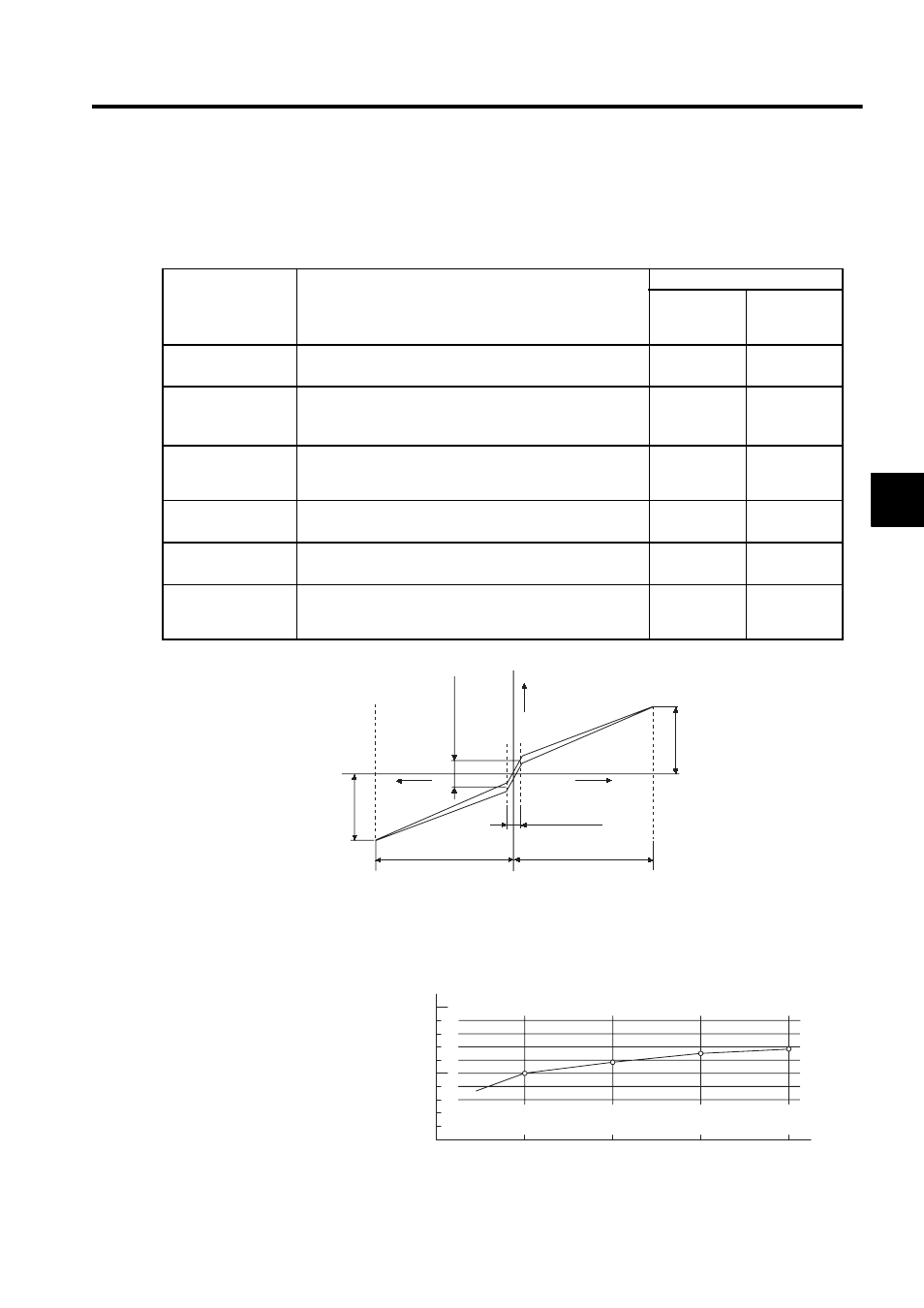
(1) Terms for Servomotors With Standard Backlash Gears and Low-backlash Gears
* See the following graph for lost motion and torsion rigidity.
(2) Noise Data
The following noise data for a servomotor with a gear is for reference only and may slightly vary with the capac-
ity and gear ratio of the servomotor.
Terminology for Servomotors with Gears
Item
Measurement Method/Definition
Typical Value
Standard
Backlash
Gears
Low-back-
lash Gears
Rated Input Motor
Speed (min
-1
)
−
3000
3000
Max. Allowable
Input Motor Speed
(min
-1
)
−
4000
4000
Rated Torque
(Nxm)
The rated output torque of the motor is the gear input torque.
The rated torque is this value multiplied by the inverse of the
gear ratio and efficiency.
−
−
Lost Motion
(arc-min)
∗
Angular difference in the screw with a
±5% rated torque
load. (Maximum value at any four positions during output.)
15 max.
3 max.
Torsion Rigidity
(arc-min)
∗
Highest torsion angle value on one side with a
± rated torque
load
22 max.
10 max.
Angular Transmis-
sion Error Accuracy
(arc-min)
Difference in absolute accuracy for one rotation under load
and no-load conditions during output.
10 max.
6 max.
Lost
motion
Torsion
rigidity
Torsion
rigidity
Torsion
rigidity
- Torque
+ Torque
Rated torque
Rated torque
±5% Rated torque
Measurement Conditions:
• Scale A: 50 cm (19.7 in)
• Ground Noise: 28 dB
1000
2000
3000
4000
50
100
Input speed (min )
-1
Initial Noise
Level (dB)