2) holding brake moment of inertia, 3) holding brake electrical specifications, 4) torque-motor speed characteristics – Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 44
3.1 Ratings and Specifications of SGMMJ (3000 min
-1
)
3-3
3
(2) Holding Brake Moment of Inertia
The moment of inertia of the servomotor with holding brake is expressed using the following equation.
(The moment of inertia of the servomotor with holding brake) = (rotor moment of inertia) +
(brake moment of inertia)
* These values are reference values.
(3) Holding Brake Electrical Specifications
Note: The holding brake is only used to hold the load and cannot be used to stop the servomotor.
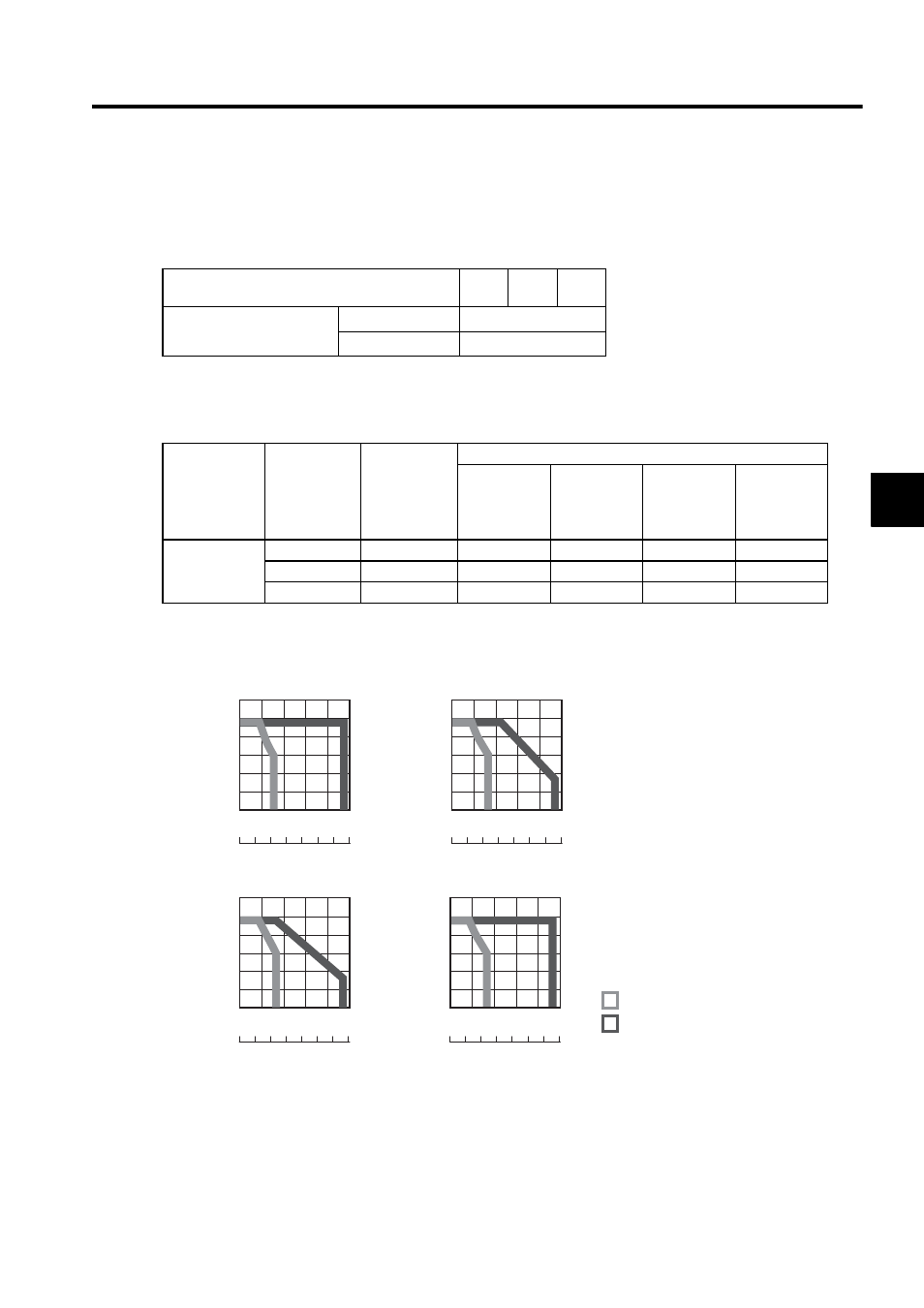
(4) Torque-motor Speed Characteristics
Servomotor Model
SGMMJ-
A1
A2
A3
Holding Brake Moment of
Inertia J
×10
-4
kgxm
2
0.00125
×10
-3
ozxinxs
2
0.0177
Holding Brake
Rated Voltage
Servomotor
Model
Servomotor
Capacity
W
Holding Brake Specifications
Capacity
W
Holding
Torque
N
x
m (oz
x
in)
Coil
Resistance
Ω(at 20
°
C
(68
°
F))
Rated
Current
A (at 20
°
C
(68
°
F))
24 VDC
SGMMJ-A1
10
2.0
0.0318 (4.50)
320
0.08
SGMMJ-A2
20
2.6
0.0638 (9.03)
222
0.11
SGMMJ-A3
30
2.6
0.0955 (13.5)
220
0.11
SGMMJ-A1C(DC24V)
SGMMJ-A2C(DC24V)
0
1000
2000
3000
4000
5000
1000
2000
3000
4000
5000
0 0.02 0.04 0.06 0.08 0.10
0
0 0.04 0.08 0.12 0.16 0.20
A
B
A
B
A
B
A
B
SGMMJ-A3C(DC24V)
SGMMJ-A1E(DC48V)
0
1000
2000
3000
4000
5000
1000
2000
3000
4000
5000
0 0.06 0.12 0.18 0.24 0.30
0
0 0.02 0.04 0.06 0.08 0.10
A : Continuous Duty Zone
B : Intermittent Duty Zone
Motor
speed
(min
-1
)
Motor
speed
(min
-1
)
Motor
speed
(min
-1
)
Motor
speed
(min
-1
)
0 2 4 6 8 10 12 14
Torque (Nxm)
Torque (ozxin)
0 2 4 6 8 10 12 14
Torque (Nxm)
Torque (ozxin)
0 4 8 12 16 20 24 28
Torque (Nxm)
Torque (ozxin)
0 6 12 18 24 30 36 42
Torque (Nxm)
Torque (ozxin)