Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 267
9 Adjustments
9.4.3 Proportional Control Operation (Proportional Operation Reference)
9-16
9.4.3 Proportional Control Operation (Proportional Operation Reference)
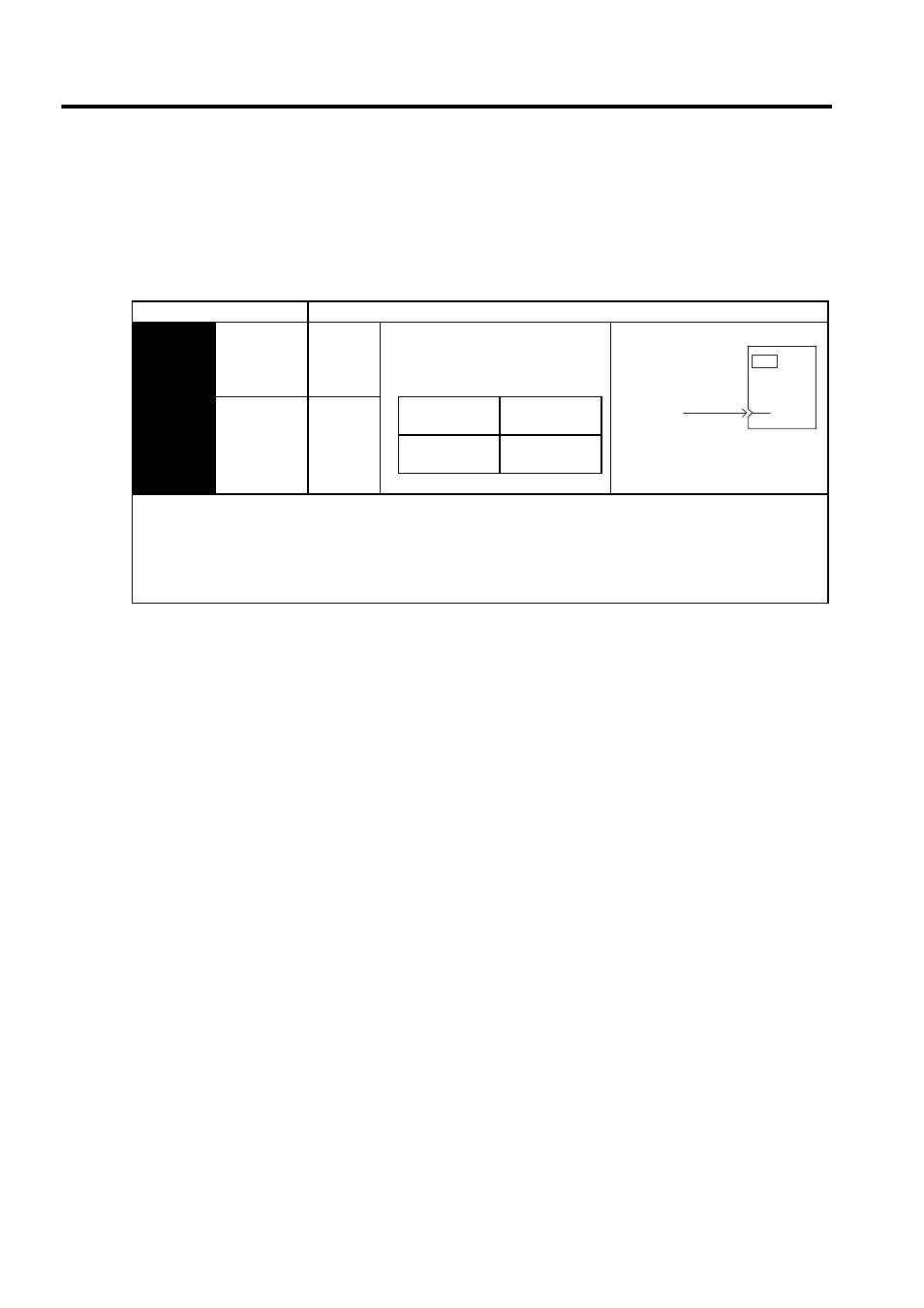
If parameter Pn000.1 is set to 0 or 1 as shown below, the /P-CON input signal serves as switch to change between
PI control and P control.
• PI control: Proportional/Integral control
• P control: Proportional control
Parameter
Control Mode
Pn000
n.0
Speed
Control
Effective in speed control or position
control.
Input signal /P-CON (CN1-15) is used
to select PI control or P control.
n.1
Position
Control
CN1-15 is OFF
(H level).
PI control
CN1-15 is ON
(L level).
P control
• When sending references from the host controller to the SERVOPACK, P control mode can be selected from the host
controller for particular operating conditions. This mode switching method can be used to suppress overshooting and
shorten the settling time. Refer to 9.4.4 Using the Mode Switch (P/PI Switching) for more details on inputting the /P-
CON signal and switching the control mode for particular operating conditions.
• If PI control mode is being used and the speed reference has a reference offset, the servomotor may rotate very slowly
and fail to stop even if 0 is specified as the speed reference. In this case, use P control mode to stop the servomotor.
SERVOPACK
/P-CON
P/PI
Switching
15
CN1