Motor performance fine-tuning, Fine-tuning v/f control, 2 motor performance fine-tuning – Yaskawa AC Drive Z1000 Bypass Technical Manual User Manual
Page 220
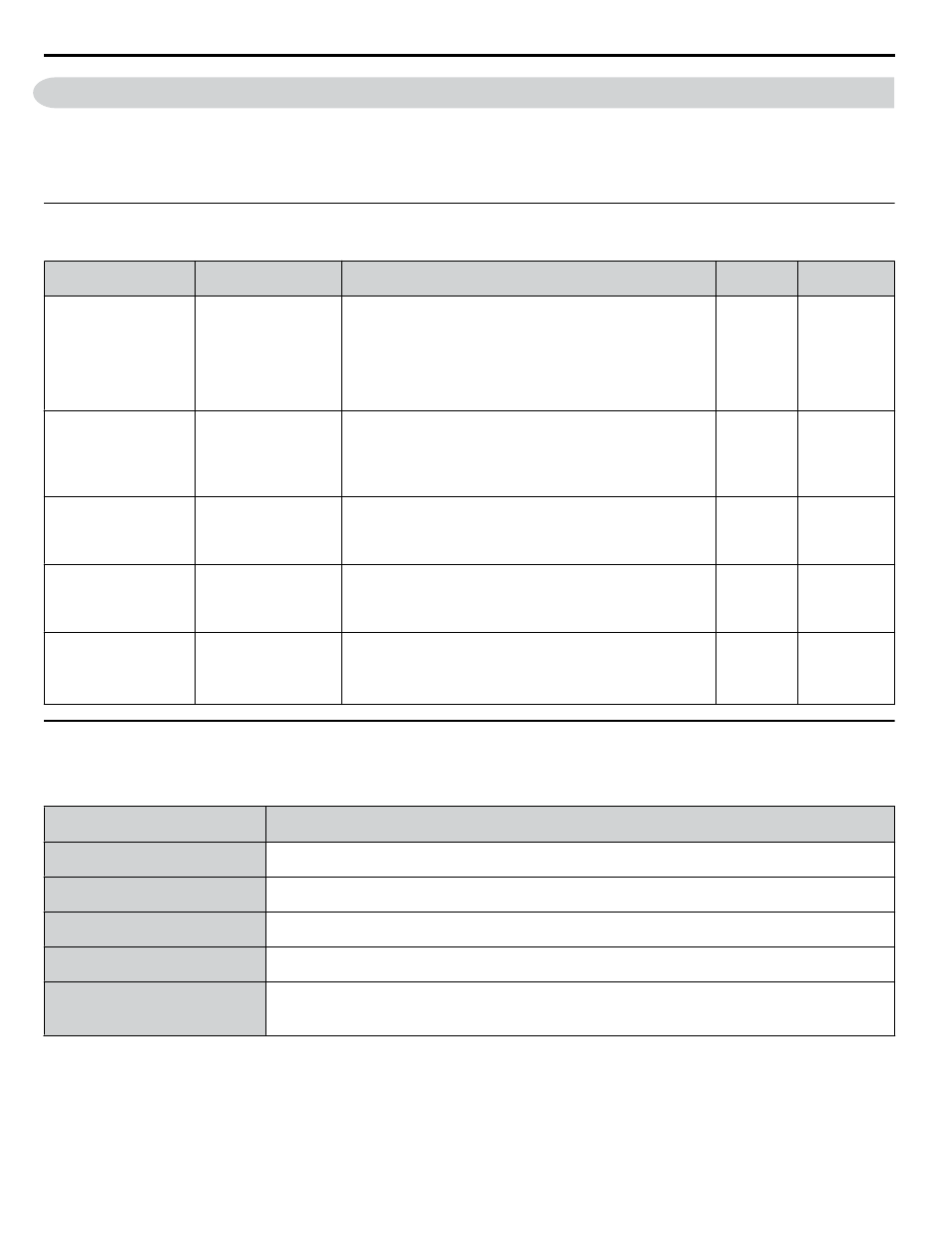
6.2 Motor Performance Fine-Tuning
This section offers helpful information for counteracting oscillation, hunting, and other problems that occur while performing
a trial run. Refer to the section below that corresponds to the motor control method used.
Note:
This section describes commonly edited parameters that may be set incorrectly. Consult Yaskawa for more information on detailed settings
and for fine-tuning the drive.
u
Fine-Tuning V/f Control
Table 6.1 Parameters for Fine-Tuning Performance in V/f
Problem
Parameter No.
Corrective Action
Default
Suggested
Setting
Motor hunting and
oscillation at speeds
between 10 and 40 Hz
Hunting Prevention Gain
(n1-02)
• Reduce the setting if insufficient motor torque relative to the size
of the load causes hunting.
• Increase the setting when motor hunting and oscillation occur
with a light load.
• Reduce the setting if hunting occurs when using a motor with a
relatively low inductance, such as a high-frequency motor or a
motor with a larger frame size.
1.00
0.10 to 2.00
• Motor noise
• Motor hunting and
oscillation at speeds up
to 40 Hz
Carrier Frequency
Selection (C6-02)
• Increase the carrier frequency If the motor noise is too loud.
• Lower the carrier frequency when motor hunting and oscillation
occur at speeds up to 40 Hz.
• The default setting for the carrier frequency depends on the drive
capacity (o2-04).
1 (2 kHz)
1 to max. setting
• Poor torque or speed
response
• Motor hunting and
oscillation
Torque Compensation
Primary Delay Time
(C4-02)
• Reduce the setting if motor torque and speed response are too
slow.
• Increase the setting if motor hunting and oscillation occur.
Depends on
o2-04, Drive
Model
Selection
100 to 1000 ms
• Poor motor torque at
speeds below 10 Hz
• Motor hunting and
oscillation
Torque Compensation
Gain (C4-01)
• Increase the setting if motor torque is insufficient at speeds
below 10 Hz.
• Reduce the setting if motor hunting and oscillation with a
relatively light load.
1.00
0.50 to 1.50
• Poor motor torque at
low speeds
• Motor instability at
motor start
V/f Pattern Selection
(E1-03)
• Increase the setting if motor torque is insufficient at speeds
below 10 Hz.
• Reduce the setting If motor instability occurs at motor start.
• Set E1-03 to a pattern that fits the application.
Depends on
o2-04
Default setting
±5 V
u
Parameters to Minimize Motor Hunting and Oscillation
In addition to the parameters discussed in
indirectly affect motor hunting and oscillation.
Table 6.2 Parameters that Affect Control Performance in Applications
Name
(Parameter No.)
Application
Accel/Decel Time
(C1-01 through C1-11)
Adjusting accel and decel times will affect the torque presented to the motor during acceleration or deceleration.
S-Curve Characteristics
(C2-01 and C2-02)
Prevents shock at the beginning and end of acceleration and deceleration.
Jump Frequency
(d3-01 through d3-04)
Skips over the resonant frequencies of connected machinery.
Analog Filter Time Constant
(H3-13)
Prevents fluctuation in the analog input signal due to noise.
Stall Prevention
(L3-01 through L3-06, L3-11)
• Prevents motor speed loss and overvoltage when the load is too heavy or during sudden acceleration/
deceleration.
• Adjustment is not normally necessary because Stall Prevention is enabled as a default.
6.2 Motor Performance Fine-Tuning
220
YASKAWA ELECTRIC SIEP YAIZ1B 01D YASKAWA AC Drive – Z1000 Bypass Technical Manual