Setting stop functions, Adjusting offset, C) position control (pulse train reference) – Yaskawa FSP Amplifier User Manual
Page 121: D) programming mode (serial communication command), Reference offset adjustment
FSP Amplifier User’s Manual
Chapter 5: Parameter Settings and Functions
5-54
(C) Position Control (Pulse Train Reference)
This mode controls positioning using a pulse train input reference. See
5.2.2 Position Reference.
(D) Programming Mode (Serial Communication Command)
This mode controls positioning and torque using a serial communication.
See 5.9 Configuration of Serial Command for AB Encoders.
5.4. Setting Stop Functions
This section describes the procedure used to stop the servo amplifier properly.
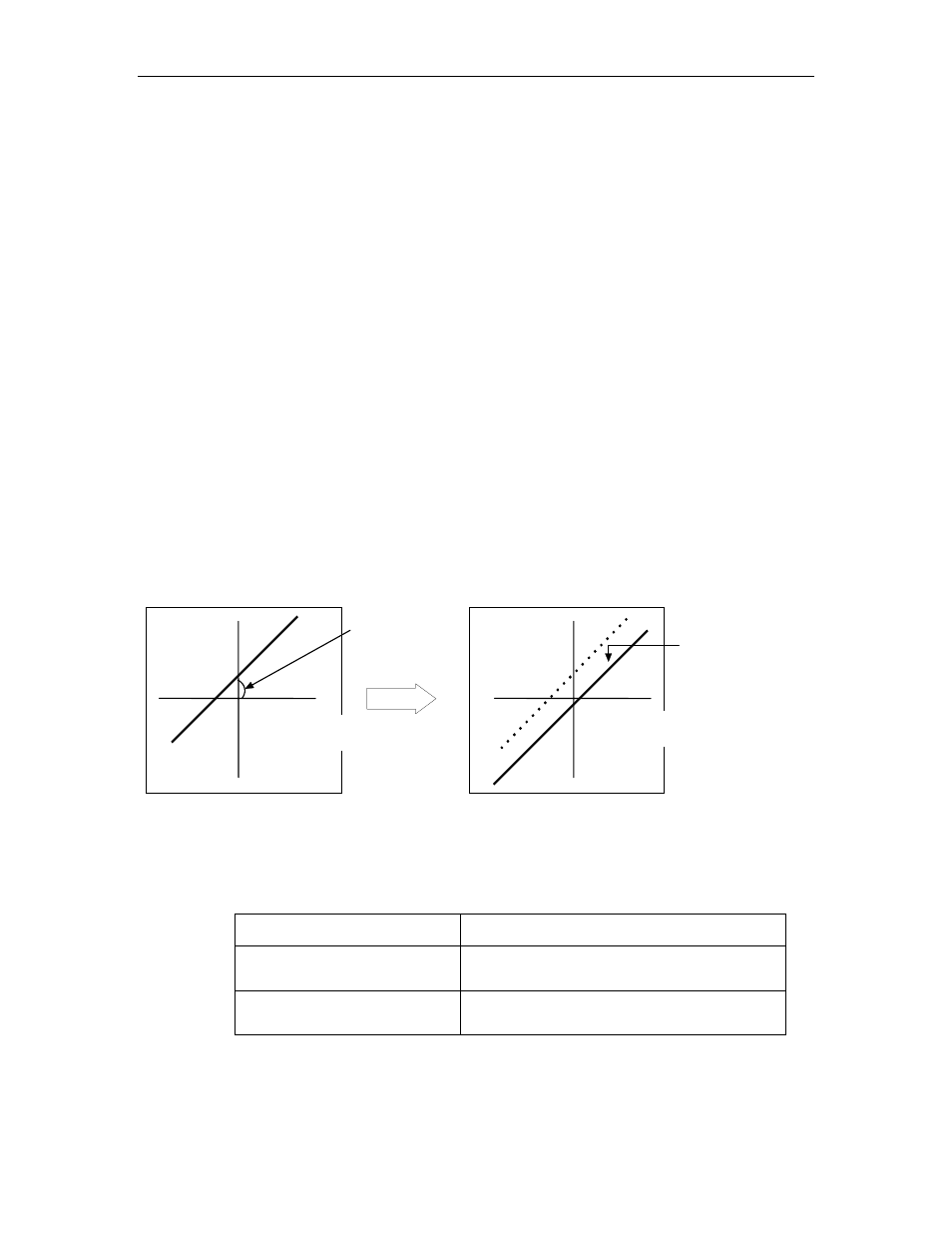
5.4.1. Adjusting Offset
When the Servomotor Will Not Stop
The servomotor may rotate at very low speed and not stop even when 0 V
is specified as the reference voltage for servo amplifier speed and torque
control (analog reference). This happens when the reference voltage from
the host controller or external circuit is slightly offset (in mV units). The
servomotor will stop if this offset is properly adjusted to 0 V.
Offset
Reference
voltage
Reference
voltage
Reference speed
or torque
Offset corrected
by the FSP Amplifier
Reference speed
or torque
Offset adjustment
Reference Offset Adjustment
The following methods can be used to adjust the reference offset to 0 V.
Adjustment Method
Result
Automatic Adjustment of
Reference Offset
The reference offset is automatically adjusted to
0 V.
Manual Adjustment of
Reference Offset
The reference offset can be set to a specified
value.
Note:
Use manual adjustment rather than automatic adjustment if a position control loop is formed in the host
controller.