Yaskawa FSP Amplifier User Manual
Page 303
FSP Amplifier User’s Manual
Chapter 9: Inspection, Maintenance, and Troubleshooting
9-38
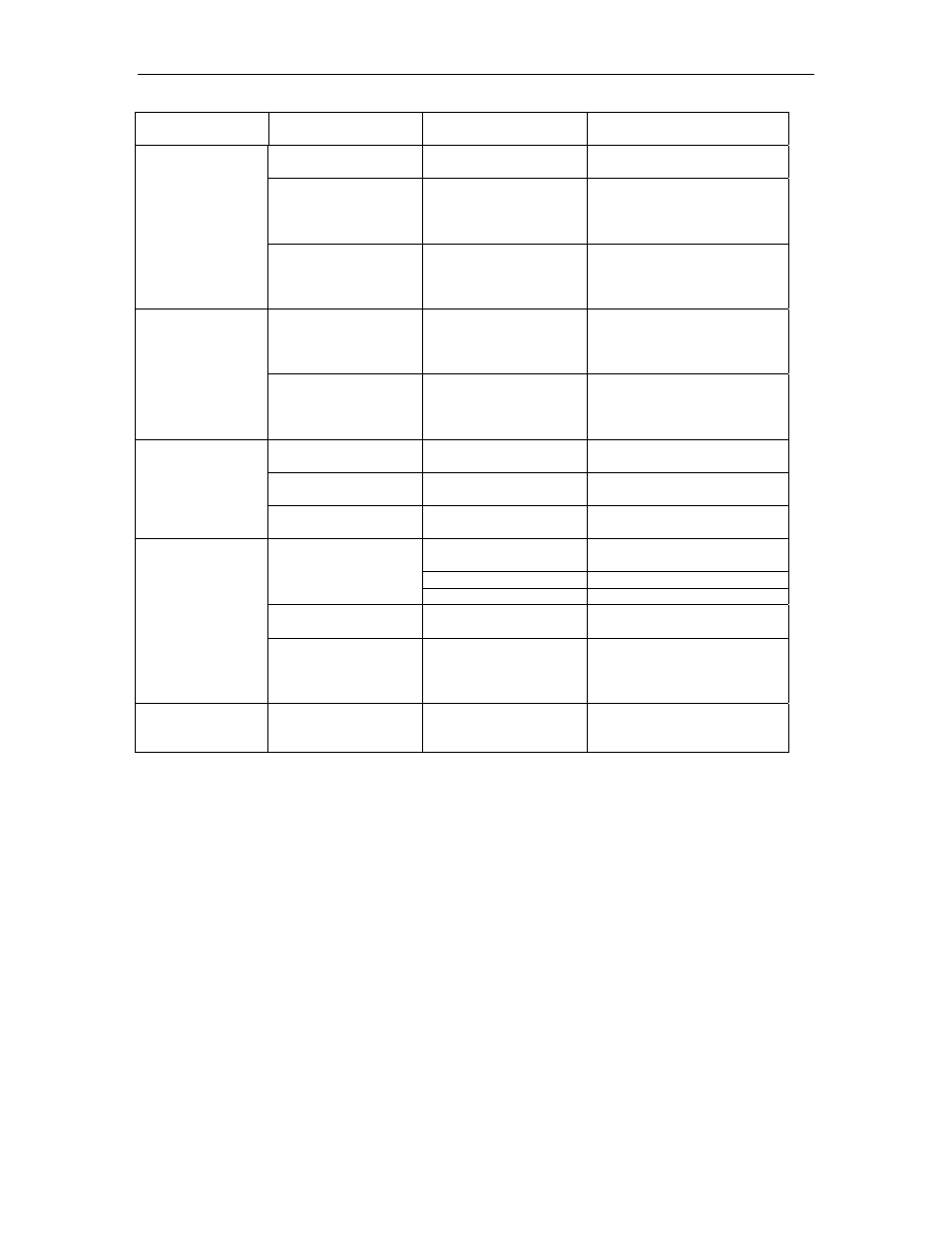
Symptom Cause Comment
Solution
Speed loop gain value
too high.
—
Reduce speed loop gain
(Pn100) preset value.
Speed/position
reference input wire
too long.
—
Minimize length of speed/
position reference input wire,
with impedance not exceeding
several hundred Ω.
Servomotor
vibrates at
approximately 200
to 400 Hz.
Speed/position
reference input wire is
bundled with power
cables.
—
Separate reference input wire
at least 30 cm from power
cables.
Speed loop gain value
too high.
—
Reduce speed loop gain
(Pn100) preset value.
Increase integration time
constant (Pn101).
High rotation speed
overshoot on
starting and
stopping.
Speed loop gain is too
low compared to
position loop gain.
—
Increase the value of
parameter Pn100 (speed loop
gain). Reduce the integration
time constant (Pn101).
Ambient temperature
too high
Measure servomotor
ambient temperature.
Reduce ambient temperature
to 40°C maximum.
Servomotor surface
dirty
Visual check
Clean dust and oil from motor
surface.
Servomotor
overheated
Overloaded
Run under no load.
Reduce load or replace with
larger capacity servomotor.
Servomotor mounting
screws loose?
Tighten mounting screws.
Coupling not centered?
Center coupling.
Incorrect mechanical
mounting
Coupling unbalanced?
Balance coupling.
Bearing defective
Check noise and
vibration near bearing.
Consult your YEA
representative if defective.
Abnormal noise
Machine causing
vibrations
Foreign object intrusion,
damage, or deformation
of sliding parts of
machine.
Consult with machine
manufacturer.
Speed reference
0 V but servomotor
rotates.
Speed reference
voltage offset applied
—
Adjust reference offset.
Refer to sections 7.2.3 and
7.2.4.