Stop mode – Yaskawa FSP Amplifier User Manual
Page 74
FSP Amplifier User’s Manual
Chapter 5: Parameter Settings and Functions
5-7
Parameter Signal Setting
Control
Mode
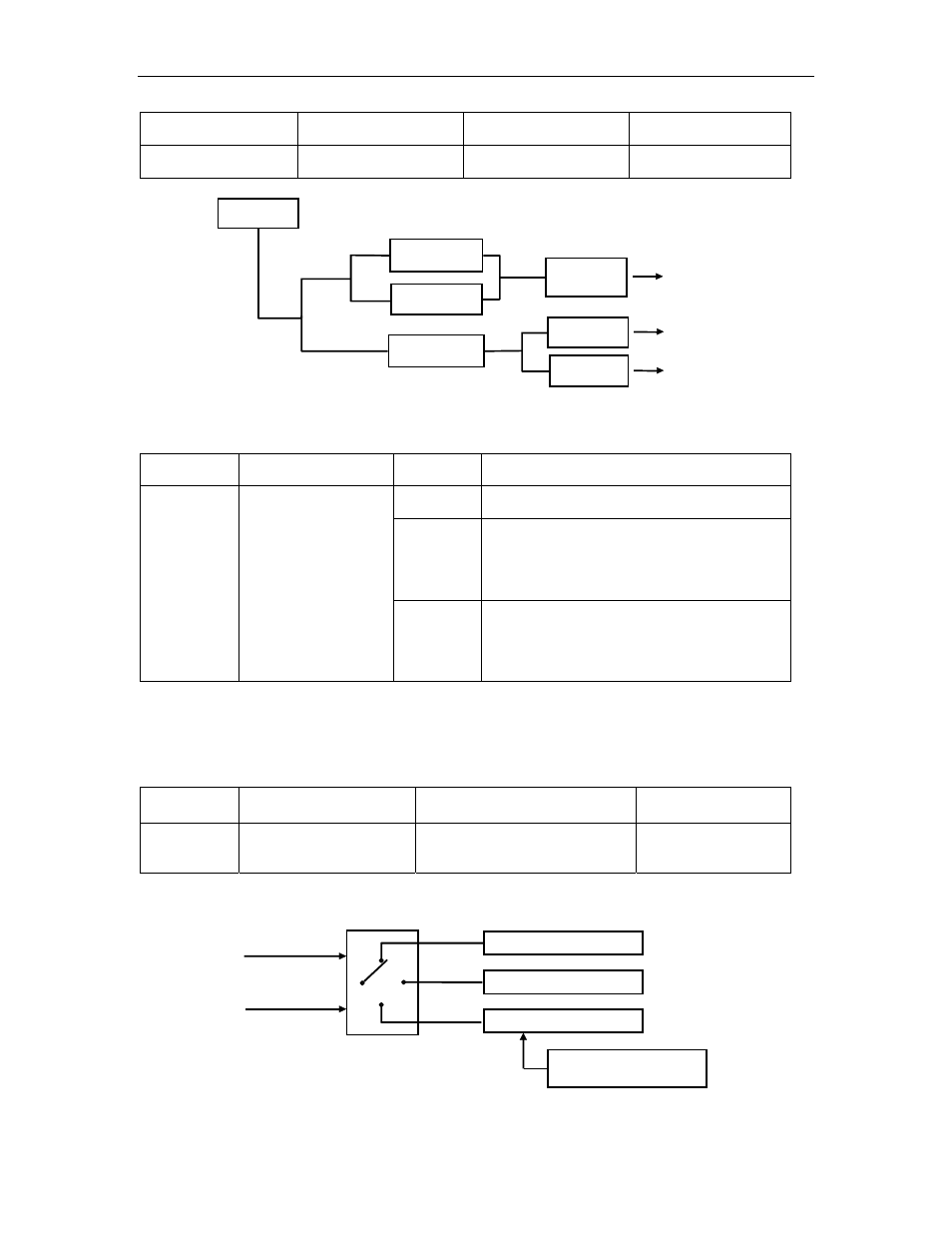
Pn001.1
Overtravel Stop Mode
Default Setting: 0
Speed, Torque, and
Position Control
Overtravel
Stop by
dynamic brake
Coast to a stop
Coast status
Zero clamp
Coast status
Decelerate
to a stop
Stop Mode
After Stopping
Pn001.0
= 0
Pn001.1
= 0
Pn001.1
= 1 or 2
1
2
Pn001.1
setting
0
1
2
Note: For torque control, the servomotor will be placed in coast status after either decelerating or coasting to a stop
(according to the Stop mode set in Pn001.0), regardless of the setting of Pn001.1.
Parameter Signal Setting
Control
Mode
0
Stops the servomotor the same way as
turning the servo OFF (according to Pn001.0).
1
Decelerates the servomotor to a stop at the
preset torque, and then locks the servomotor
in Zero Clamp mode.
Torque setting: Pn406 Emergency Stop
Torque
Pn001.1
Overtravel Stop
Mode
2
Decelerates the servomotor to a stop at the
preset torque, and puts the servomotor in
coast status.
Torque setting: Pn406 Emergency Stop
Torque
Pn406 specifies the stop torque applied for overtravel when the input signal
for prohibiting forward or reverse rotation is used.
The torque limit is specified as a percentage of rated torque.
Parameter Signal
Setting
(% of Rated Torque)
Control Mode
Pn406
Emergency Stop Torque
(Valid when Pn001.1 is 1
or 2)
Range: 0 to 800
Default Setting: 800
Speed, Torque, and
Position Control
Stop Mode
Stop by dynamic brake
Coast to a stop
Decelerate to a stop
Max. torque setting for an
emergency stop
Forward run
prohibit input
P- OT (CN1 -42)
Reverse run
prohibit input
N - OT (CN1 -43)
Pn406