Additional parameters tuning, Filters – Yaskawa FSP Amplifier User Manual
Page 183
FSP Amplifier User’s Manual
Chapter 6: Servo Adjustment
6-16
• Kis (Pn1A9) range 0 to 500 [Hz] default 40:
This parameter is the equivalent of the integral loop gain. It cancels the
position error at stop and minimizes it during movement.
As for previous gains, increase until vibrations occur, then reduce back
to a safe value.
The oscillations observed when a too high Kis is used are usually at
lower frequency.
• Kff (Pn1AF) range 0 to 200 [%] default 0. This parameter is used
only in a serial command (Pn000.1 = D):
This parameter is the feed forward of command acceleration into the
command torque. Tune this parameter after you finished tuning the
previous parameters. It reduces position error during movement and
during acceleration and deceleration phase.
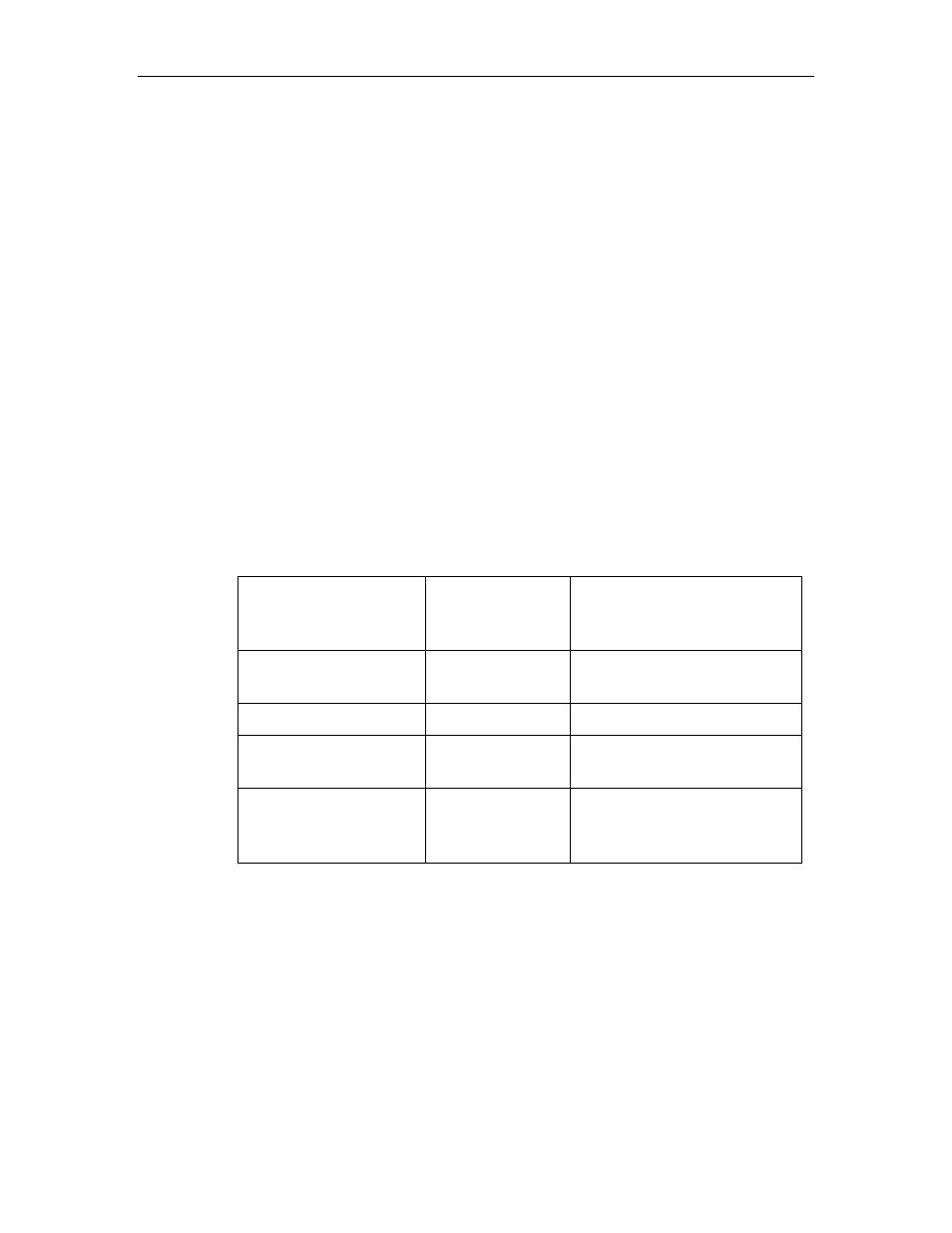
6.3.4. Additional Parameters Tuning
After having set the default value for a given load, additional tuning may
be done. Typically, the following parameters can be further tuned:
Torque Filters
Pn1A2 - Pn1A5
To prevent vibrations with
flexible coupling and poor
damping.
Command Smoothing
Pn216
To smooth movement in
case of flexible system.
Tightness Pn1A0
To
increase/decrease
gain.
Variable gain
Pn1B5 - Pn1B9
To increase gain during
movement.
Flexible system
Pn1BB - Pn1BD
To compensate the
overshoot and smooth the
movement.
6.3.5. Filters
Filters are used to avoid vibrations, thus allowing a higher value of loop
gain.
Filters should be set in an iterative way, where each time a new filter value
is tried; the velocity loop gain is re-tuned. Typically, the final value
selected for the filter will be the one that allows the highest Kd.