Using the encoder signal output, I/o signals, I/o signals are described below – Yaskawa FSP Amplifier User Manual
Page 87
FSP Amplifier User’s Manual
Chapter 5: Parameter Settings and Functions
5-20
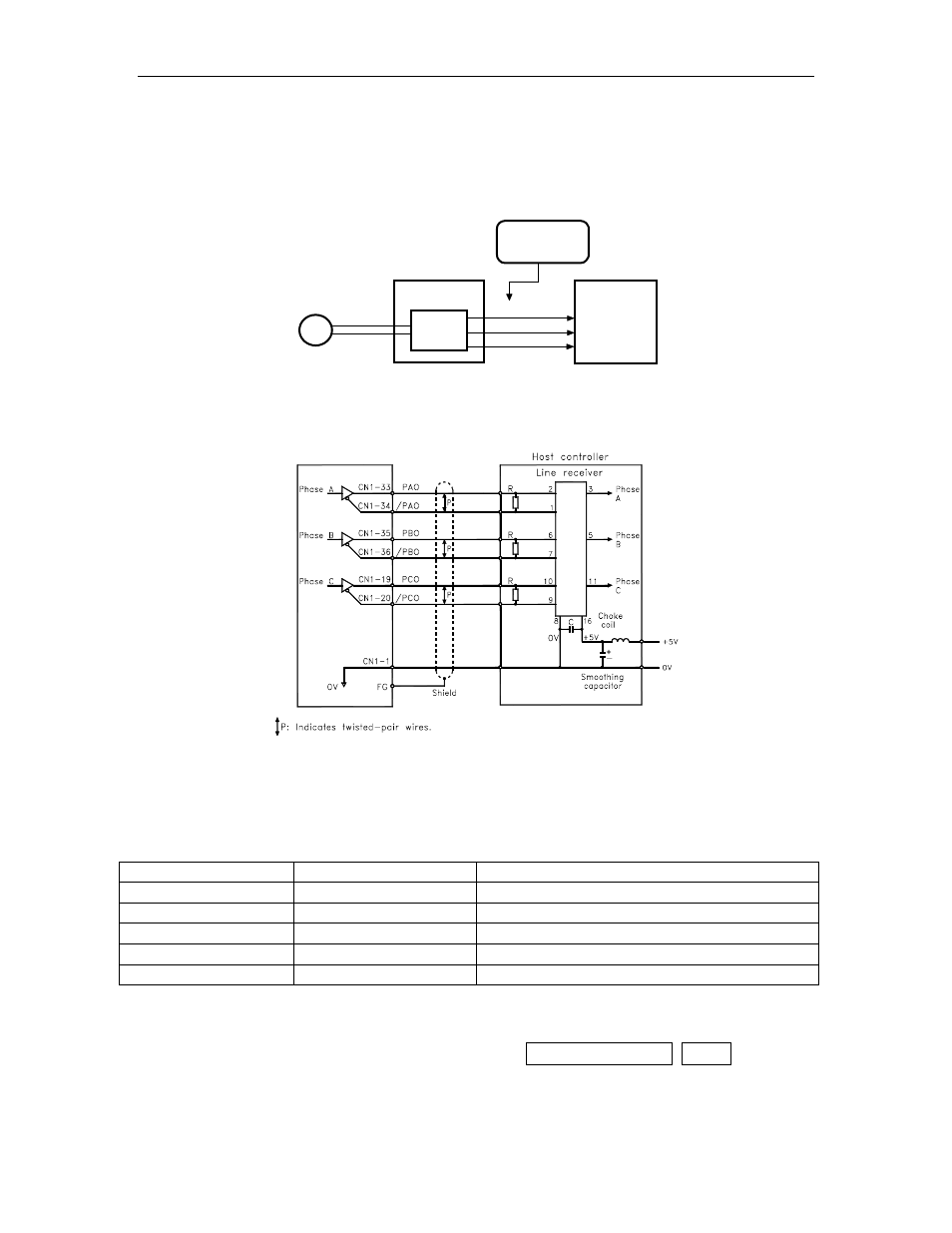
5.2.3. Using the Encoder Signal Output
Encoder output signals are divided inside the servo amplifier and can be
output externally. These signals can be used to form a position control loop
in the host controller.
FSP Amplifier
Frequency
dividing
circuit
Encoder
CN1
CN2
PG
Host
controller
These outputs
explained here
Phase A
Phase B
Phase C
The output circuit is for line-driver output. Connect each signal line
according to the following circuit diagram.
FSP Amplifier
Note: Dividing means converting an input pulse train from the encoder mounted on the servomotor according to
the preset pulse density and outputting the converted pulse. The units are pulses per revolution (PPR).
I/O Signals
I/O signals are described below.
Output Ö PAO CN1-33
Encoder Output Phase A
Speed, Torque, Position Control, and Programming
Output Ö /PAO CN1-34
Encoder Output Phase /A
Speed, Torque, Position Control, and Programming
Output Ö PBO CN1-35
Encoder Output Phase B
Speed, Torque, Position Control, and Programming
Output Ö /PBO CN1-36
Encoder Output Phase /B
Speed, Torque, Position Control, and Programming
Output Ö PCO CN1-19
Encoder Output Phase C
Speed, Torque, Position Control, and Programming
Output Ö /PCO CN1-20
Encoder Output Phase /C
Speed, Torque, Position Control, and Programming
Divided encoder signals are outputs; therefore always connect these signal terminals
when a position loop is formed in the host controller for position control.
Set a dividing ratio using the following parameter: PG Dividing Ratio Pn201
The dividing ratio setting is not related to the gear ratio setting (Pn202 and Pn203) for the
servo amplifier electronic gear function during position control.