Position reference – Yaskawa FSP Amplifier User Manual
Page 81
FSP Amplifier User’s Manual
Chapter 5: Parameter Settings and Functions
5-14
Using the /P-CON Signal
Ö Input P-CON CN1-41
Proportional Control
Reference
Speed Control, Position
Control
The /P-CON input signal switches the Speed Control mode from PI
(proportional-integral) to P (proportional) control.
Proportional control can be used in the following two ways:
• When an operation is performed by sending speed references from the
host controller to the servo amplifier, the host controller can selectively
use the P control mode for particular conditions only. This method can
prevent the occurrence of overshoot and also shorten settling time.
• If PI control mode is used when the speed reference has a reference
offset, the motor may rotate at a very slow speed and fail to stop even if
0 is specified as speed reference. In this case, use the P control mode to
stop the motor.
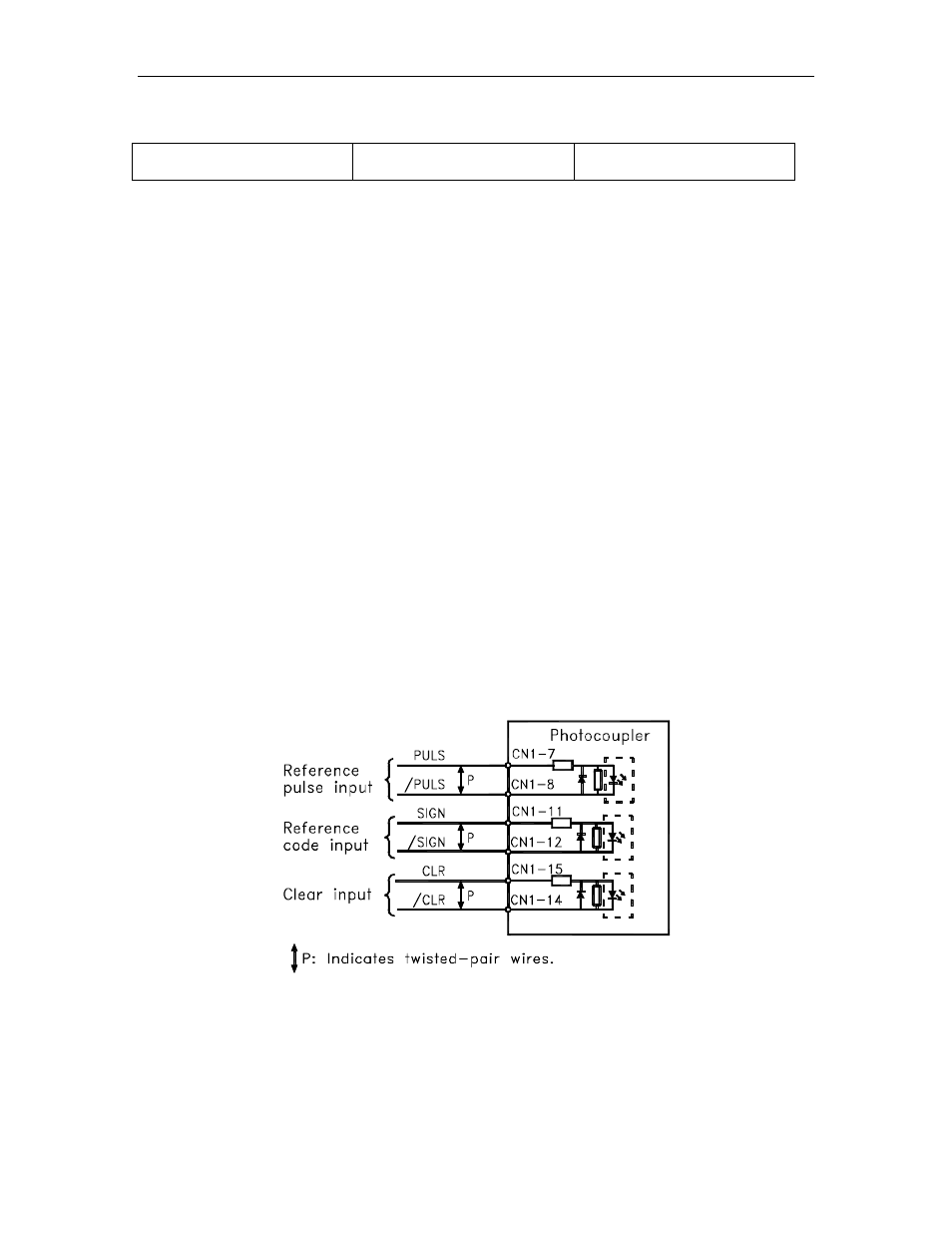
5.2.2. Position Reference
The reference pulse, reference code, and clear inputs are used for the
position reference. Since this signal can be used in different ways, set the
optimal reference input for the system created.
Reference by Pulse Input
Positioning is controlled by entering a reference pulse for a move.
FSP Amplifier
Any of the following forms can be used for the position reference:
• Line-driver output
• +12 V open-collector output
• +5 V open-collector output