5) servo off stop mode selection, 3 software limit settings, 1) software limit function – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 200: 3 sof, 3 software limit settings -11, 11 (5) servo off stop mode selection
7.3 Settings According to Machine Characteristics
7-11
(5) Servo OFF Stop Mode Selection
The SERVOPACK turns OFF under the following conditions:
• The SV_OFF command is transmitted.
• Servo alarm occurs.
• Power is turned OFF.
Specify the Stop Mode if any of these occurs during servomotor operation.
Note: If the servomotor is stopped or rotating at extremely low speed when the Pn001.0 is set to
0 (dynamic brake status after stopping with the dynamic brake), then braking power is not
generated and the servomotor will stop the same as in coast status.
7.3.3 Software Limit Settings
The software limits set limits in software for machine movement that do not use the overtravel signals (P-OT and
N-OT). If a software limit is exceeded, an emergency stop will be executed in the same way as it is for overtravel.
(1) Software Limit Function
The software limits can be enabled or disabled.
The software limit function parameter is used to enable the software limit function.
The software limits can be enabled under the following conditions. Under all other circumstances, the software
limits will not be enabled even if a software limit is exceeded.
• The ZRET command has been executed.
• REFE = 1 using the POS_SET command.
Enable or disable the software limits using one of the following settings.
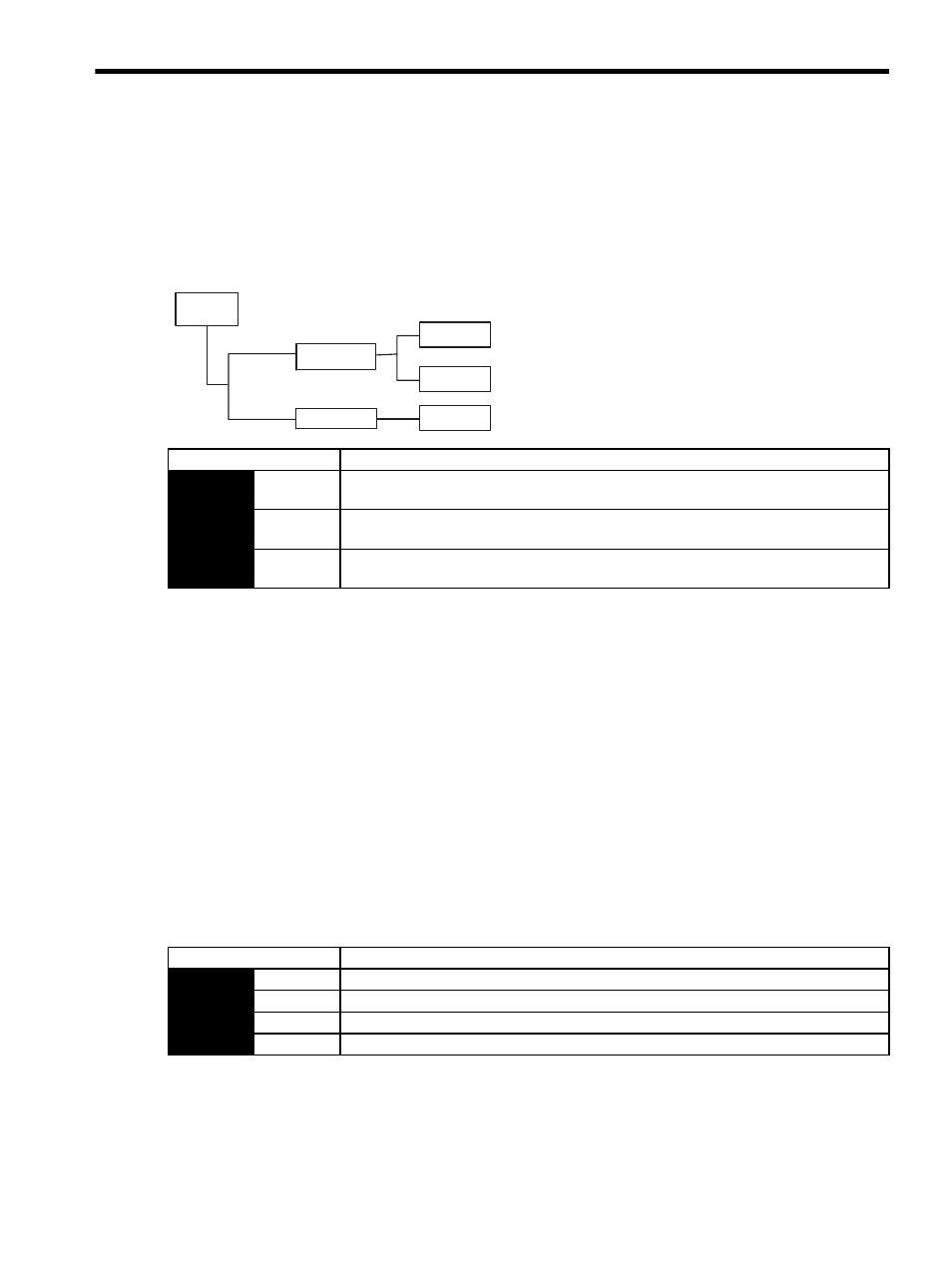
Stop Mode
After stopping
Hold with
dynamic brake
0
1
Pn001.0 = 0
or 1
Servo
OFF
Pn001.0 = 2
The dynamic brake electrically applies a
brake by using a resistor to consume
servomotor rotation energy.
Refer to 7.6.1 Using the Dynamic Brake.
Stop by dynamic
brake
Coast to a stop
Coast status
Coast status
Parameter
Description
Pn001
n.
0
Uses the dynamic brake to stop the servomotor, and maintains dynamic brake status after
stopping. (Factory setting)
n.
1
Uses the dynamic brake to stop the servomotor, and cancels dynamic brake status after
stopping to go into coast status.
n.
2
Coasts the servomotor to a stop. The servomotor is turned OFF and stops due to machine
friction.
Parameter
Description
Pn801
n.
0
Software limits enabled.
n.
1
Forward software limit disabled.
n.
2
Reverse software limit disabled.
n.
3
Both software limits disabled. (Factory setting)