2) output signal connections, 2 using the electronic gear function, 2 using – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 203: 2 using the electronic gear function -14, Ee 7.4.2, Important
7 Operation
7.4.2 Using the Electronic Gear Function
7-14
Contact input signals: /DEC (CN1-9)
P-OT (CN1-7)
N-OT (CN1-8)
/EXT1 (CN1-10)
/EXT2 (CN1-11)
/EXT3 (CN1-12)
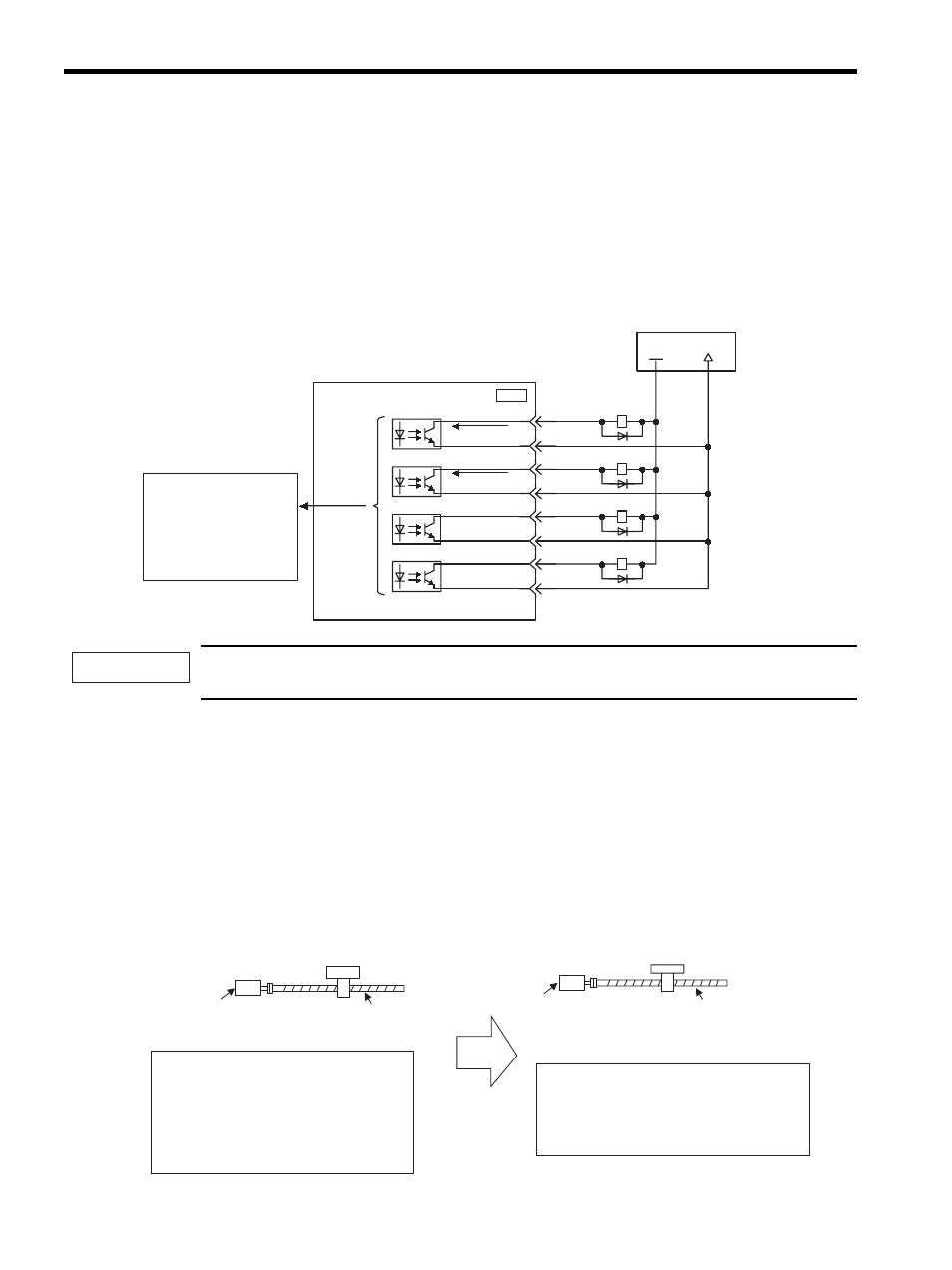
(2) Output Signal Connections
Connect the sequence output signals as shown in the following figure. (Factory setting)
Provide a separate external I/O power supply; the SERVOPACK does not have an internal 24-V power
supply. Yaskawa recommends using the same type of external power supply as that used for input circuits.
Function allocation for some sequence output signal circuits can be changed.
Refer to 7.5.3 Output Circuit Signal Allocation for more details.
7.4.2 Using the Electronic Gear Function
The electronic gear function enables the servomotor travel distance per input reference pulse from host controller
to be set to any value. One reference pulse from the host controller is the minimum unit and is called “one
reference unit”. It allows the host controller generating pulses to be used for control without having to consider
the machine deceleration ratio or the number of encoder pulses.
.
SERVOPACK
Photocoupler
4
3
24
23
2
1
26
25
CN1
+24 V
0 V
/SO3-
/SO3+
/BK- (/SO1-)
/BK+ (/SO1+)
/SO2-
/SO2+
ALM-
ALM+
50mA max.
50mA max.
Sequence output signals are
used to indicate SERVOPACK
operating status.
Photocoupler output
per output
Maximum operating
voltage: 30 VDC
Maximum output current:
50 mA DC
I/O power supply
IMPORTANT
When the Electronic Gear
Function is Not Used
When the Electronic Gear
Function is Used
Ball screw pitch: 6m m (0.24in)
Workpiece
No. of encoder pulses:32768
To move a workpiece 10 mm (0.39 in)
using reference units :
Reference unit: 1
µm
To move a workpiece 10 mm (0.39in):
1 revolution is 6 mm.Therefore,
10
÷ 6 = 1.6666 revolutions
32768
× 4 pulses is 1 revolution. Therefore,
1.6666
× 32768 × 4 = 218445 pulses
218445 pulses are input as references.
The equation must be calculated at the
host controller.
No. of encoder pulses:32768
Workpiece
Ball screw pitch: 6 mm (0.24 in)
The reference unit is 1
µm. Therefore,
to move the workpiece 10 mm (10000
µm),
1pulse = 1
µm,so
10000/1 = 10000 pulses.
Input 1000 pulses.